La Bibliothèque d'Applications présente des modèles construits avec COMSOL Multiphysics pour la simulation d'une grande variété d'applications, dans les domaines de l'électromagnétisme, de la mécanique des solides, de la mécanique des fluides et de la chimie. Vous pouvez télécharger ces modèles résolus avec leur documentation détaillée, comprenant les instructions de construction pas-à-pas, et vous en servir comme point de départ de votre travail de simulation. Utilisez l'outil de recherche rapide pour trouver les modèles et applications correspondant à votre domaine d'intérêt. Notez que de nombreux exemples présentés ici sont également accessibles via la Bibliothèques d'Applications intégrée au logiciel COMSOL Multiphysics® et disponible à partir du menu Fichier.
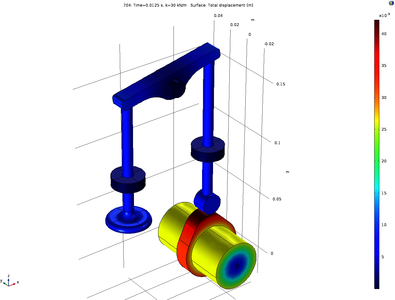
Modeling a Radial Cam Based Valve Opening Mechanism
In this example, a spring-loaded valve-opening mechanism consisting of a rocker arm and a radial cam is studied. All of the system components are modeled as rigid and are connected through prismatic, hinge, and slot joints. The cam-follower connection as well as other joint connections ... En savoir plus

Dynamics of a Roller Chain Sprocket Assembly
Chain drives are used for transmitting power from one shaft to another, located at some distance. This example simulates the dynamics of a chain sprocket assembly in 2D. The geometry consists of a roller chain wrapped around two sprockets. Both chain links and sprockets are assumed to be ... En savoir plus

Hopping Hoop
This parametrized model can be used to simulate the hopping hoop problem. A rolling ring with a point mass on the perimeter can, under certain conditions, jump up from the surface on which it is rolling. A more detailed description of this model can be found in the blog post "The ... En savoir plus
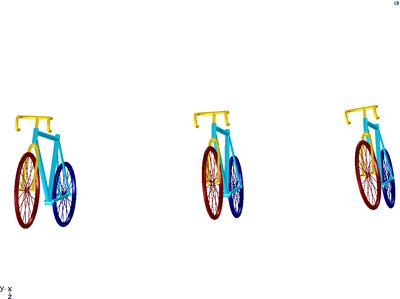
Simulating the Motion of a Bicycle on a Flat Surface
This model demonstrates the motion of a bicycle with a hands-free rider when given an initial forward velocity and perturbed with a lean about the forward axis. This is implemented through the Multibody Dynamics module in COMSOL. The wheels of the bicycle have been modelled assuming ... En savoir plus

Rolling of a Rigid Wheel
The purpose of this model is to demonstrate pure rolling of a rigid wheel when given an initial forward velocity together with a prescribed lean about this direction. It is assumed that the the rolling motion of the wheel is not affected by contact such that all three components of the ... En savoir plus
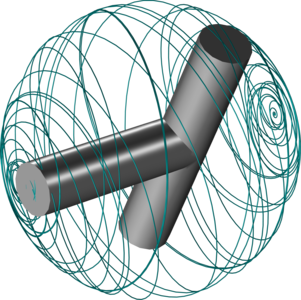
Dzhanibekov Effect
The Dzhanibekov effect, also called the intermediate axis theorem or tennis racket theorem, describes the behavior of a rigid body with three distinct principal moments of inertia. This simulation app can be used to test the Dzhanibekov effect in three different geometries, including a ... En savoir plus
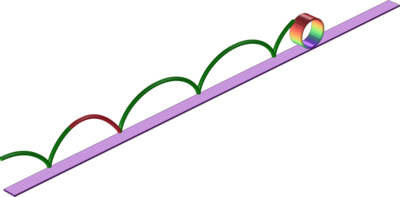
Dynamics of a Hopping Hoop
In this example, the dynamics of a hopping hoop is simulated. A rigid rolling ring with a point mass on the perimeter can, under certain conditions, jump up from the surface on which it is rolling. The effects of different parameters like initial velocity and friction are explored. You ... En savoir plus
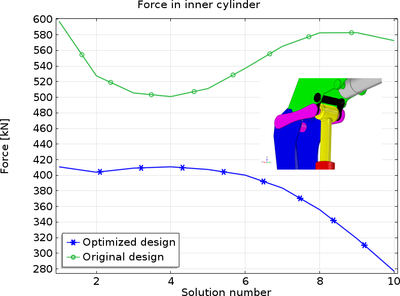
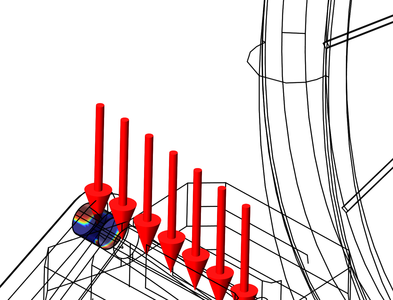
Optimization of a Crane Link Mechanism
In complex mechanical systems, it can be challenging to find an optimal (or even good enough) solution only through engineering insight or trial-and-error procedures. Using mathematical optimization methods can then be an efficient path to a better design. In this example, a link ... En savoir plus
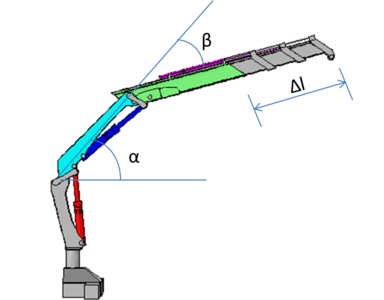
Truck Mounted Crane Analyzer
This app demonstrates the following: Using the knob form object Updating the geometry by rotating a knob Provides info if the results are above or below certain critical values Many trucks are equipped with cranes for handling loads and such cranes have a number of hydraulic ... En savoir plus
Mechanical Precession for the Axle of a Bicycle Pedal
Mechanical precession prevents bicycle pedals from falling off. The model captures this effect using a multibody dynamics simulation together with a contact analysis. A friction coefficient is associated with the contact in order for the model to capture the effect. En savoir plus