Simulation of Piezoelectric Device Structures for Force-Responsive Multi-Touch Displays
Interacting with digital devices has become part of daily life, whether in consumer products, services, or industrial applications. Most display-based devices provide user interactivity through touch sensing via a touch panel. As the number of device features increases, it demands an enhanced user-display experience; indeed, a third sensing dimension encompassing both location and force of touch has lately been explored, and a valuable amount of research has already been reported. Existing force-sensing solutions are now being incorporated into a few products; however, the current technology is costly and highly complex to fabricate. Hence, a more efficient technological solution should be explored.
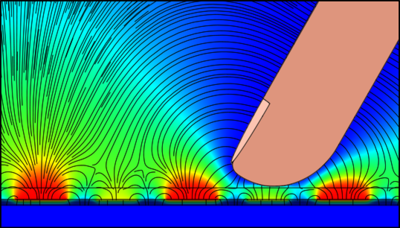
In this presentation I will describe Ultratouch technology, which uses a low-cost piezoelectric polymer to introduce force-sensitivity into a touchscreen display. The optically-transparent piezoelectric film augments a conventional capacitive touch system, providing both force and location multi-touch information from a single set of readout electrodes. In order to understand and optimize how the structural design affects the sensor’s performance, Finite Element Analyses (FEA) are performed using COMSOL Multiphysics®. Multiphysics couplings (Piezoelectric Effect, pze) are required to study how a load of known force inducing a three-dimensional mechanical deflection leads to the force-response signal, obtained in terms of the electric charge induced on the sensing electrodes. Different layer thicknesses and load magnitudes are explored using Parametric and Auxiliary Sweeps to identify optimal sensor architectures, and in addition to characterize the uniformity and linearity of response across the sensor’s plane. A further advantage of performing FEA through COMSOL Multiphysics® is that it is possible to investigate the differences between close-to-reality human finger models and the brass-finger probes commonly used in touch testing robots.
The enhancement of force response is found to be highly dependent on the position of the piezoelectric film within the sensor stack-up, as well as on the thicknesses of various adhesive and dielectric layers within the laminate. Relatively small modifications can result in unique changes to the stress profiles along the x, y and z-coordinates of the system, which then affect the net piezoelectric response in non-obvious ways. The challenge is to achieve stress profiles that do not destructively counteract each other and so provide the greatest sensor response. Through COMSOL Multiphysics® simulation, a sensor design can be chosen that will perform optimally in any individual set of geometrical constraints provided by the final product requirements.