
Le domaine de la robotique molle suscite un intérêt croissant auprès de la communauté scientifique, notamment en raison de son utilisation grandissante dans l’industrie biomédicale. Alors que des progrès en matière de biomimétisme continuent de voir le jour, les robots mous proposent d’ores et déjà des résultats prometteurs pour des applications telles que les prothèses, les muscles artificiels ou les instruments chirurgicaux. Les actionneurs jouent un rôle central dans ce domaine, agissant essentiellement comme les muscles de ces robots. Dans cet article de blog, nous découvrirons comment les composites ioniques métal–polymères (IPMC) peuvent être utilisés comme actionneurs pour ces applications à travers l’exemple d’un modèle de robot mou inspiré de la raie manta.
Un robot mou inspiré de la raie manta
Si les robots sont traditionnellement conçus à partir de matériaux rigides et durs, le développement des robots mous — la conception de robots à partir de matériaux souples tels que les élastomères, les gels ou le caoutchouc de silicone — a grandement élargi l’éventail des façons dont les robots peuvent être utilisés, en particulier dans les domaines du biomimétisme et du biomédical, comme l’exemple d’un robot inspiré de la raie manta peut le mettre en lumière. En effet, ces robots peuvent être contrôlés à distance et équipés à l’aide de capteurs sur leur face inférieure, ce qui permet aux scientifiques de recueillir des données pour des études sur la biodiversité marine sans perturber la vie aquatique. Ils sont plus maniables, moins susceptibles de s’emmêler dans les plantes aquatiques et provoquent moins de turbulences que les véhicules sous-marins traditionnels propulsés par hélices.
 Une raie manta en pleine nage. Photo de @seefromthesky sur Unsplash.
Une raie manta en pleine nage. Photo de @seefromthesky sur Unsplash.
Grâce à la modélisation et à la simulation, les ingénieurs en robotique molle bénéficient désormais de nouveaux outils pour étudier les conceptions de raie manta robotisées afin d’améliorer leurs capacités de biomimétisme. Le modèle Ionic Polymer–Metal Composite Actuators in a Robotic Manta Ray, un exemple de raie manta robotisée, illustre une manière de mettre en place un modèle pour étudier la performance des actionneurs. Le système simulé, mesurant environ 20 cm de long et 50 cm d’envergure, est de dimensions comparables aux constructions réelles de raies manta robotisées. Il utilise des actionneurs en composite polymère–métal ionique (IPMC) pour alimenter le robot, le couplage multiphysique Contraction et gonflement lui permettant de réagir aux mouvements dans un environnement fluide, comme sous l’eau dans l’océan. Les IPMC sont une sous-catégorie des polymères électroactifs, qui sont des matériaux d’actionnement générant de grandes déformations sous l’effet de stimuli électriques. Les polymères électroactifs ioniques sont alimentés par l’effet du gonflement induit par le transport ionique, qui ne nécessite généralement qu’une tension d’actionnement de 1 ou 2 V et génère naturellement un mouvement de flexion. Ils représentent un matériau idéal pour les muscles artificiels en raison de leur légèreté, de leur maniabilité et de leur capacité à générer un mouvement de battement avec des stimuli électriques, contrairement à une transmission mécanique de puissance, qui serait inefficace sur le plan énergétique.
Le couplage multiphysique Contraction et gonflement a été introduit dans la version 6.3 de COMSOL Multiphysics®. Ce couplage est particulièrement utile dans les modèles qui simulent un gonflement ou un rétrécissement d’un matériau sous l’effet d’une substance qui pénètre en son sein ou s’en dissout, respectivement. Dans ces modèles, lorsque la substance quitte le matériau, celui-ci se rétrécit, à l’instar d’une éponge qui se gonfle et se rétrécit en absorbant de l’eau puis en se desséchant. Dans le contexte du modèle présenté dans ce billet de blog, la substance serait constituée de cations hydratés, provoquant le rétrécissement et le gonflement de la nageoire de la raie manta en réponse au mouvement.
Modèle de raie manta robotisée.
Modélisation des composites ioniques métal-polymère
Dans le modèle, les deux poutres des nageoires sont constituées de trois couches de matériau IPMC. La couche centrale contient le polymère qui abrite les ions en mouvement, tandis que les couches supérieure et inférieure sont constituées d’une fine plaque métallique qui conduit l’électricité et génère une tension permettant aux particules chargées de se déplacer de haut en bas, ce qui crée le mouvement de battement.
La force motrice est fournie par un potentiel électrique externe appliqué à travers deux électrodes métalliques, avec un potentiel électrique sinusoïdal appliqué à l’électrode supérieure, l’électrode inférieure servant de masse. La nageoire, fermement fixée aux poutres, peut alors se déformer passivement. La mesure de la déformation consiste à déterminer l’ampleur du changement de forme lors du mouvement, qui, dans ce cas, est causé par un gonflement dû à un changement de la concentration de cations hydratés dans le polymère. L’approche multiphysique permet de modéliser la force générée par les IPMC en impliquant la déformation structurelle, le transport de masse et les courants électriques. Pour prendre en compte la déformation de la poutre induite par le gonflement, le modèle couple les interfaces Transport en milieu solide et Mécanique du solide. Les équations constitutives qui relient le déplacement, la concentration et le potentiel électrique proviennent des principes thermodynamiques.
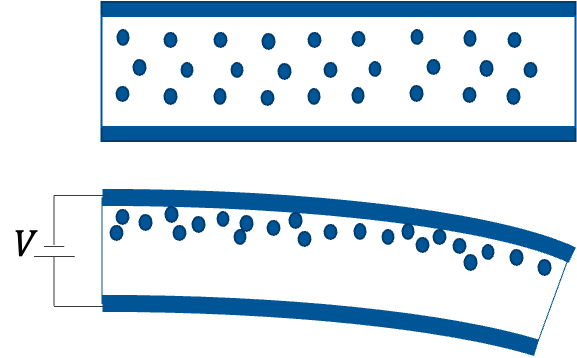 Représentation graphique de la façon dont les poutres IPMC fléchissent, se rétractent et gonflent, modifiant la position des particules.
Représentation graphique de la façon dont les poutres IPMC fléchissent, se rétractent et gonflent, modifiant la position des particules.
En outre, la fonctionnalité Conservation de la charge dans les solides est utilisée pour appliquer la conservation de la charge dans le domaine solide où se trouvent les poutres de polymères ioniques. L’interface Transport en milieu solide est utilisée pour suivre la diffusion, qui est pilotée par le gradient du potentiel chimique.
Mouvements de la raie manta
Les résultats du modèle permettent de démontrer que le mouvement des deux poutres IPMC peut être contrôlé électriquement. Il est en effet possible d’observer, lorsqu’une tension d’entrée est fournie par l’intermédiaire d’une batterie par exemple, la création du mouvement d’ondulation des nageoires nécessaire au déplacement du robot. Le modèle illustre notamment comment l’action des poutres IPMC permet de produire un mouvement de battement régulier. En revanche, le modèle n’étudie pas l’interaction de la structure avec l’eau, ou sa capacité à se déplacer dans ce fluide.
Le graphique de gauche ci-dessous montre la tension d’entrée sinusoïdale, d’une amplitude de 5 V à 0,2 Hz, avec un retard de phase entre les poutres IPMC, tandis que le graphique de droite montre la déflexion résultante de ces poutres. La poutre la plus proche du bord de fuite, représentée par la ligne verte, subit une déformation plus importante en raison de sa plus grande longueur. Le mouvement cyclique des cations positifs à travers le polymère entraîne une flexion cyclique des poutres sous l’effet du gonflement.
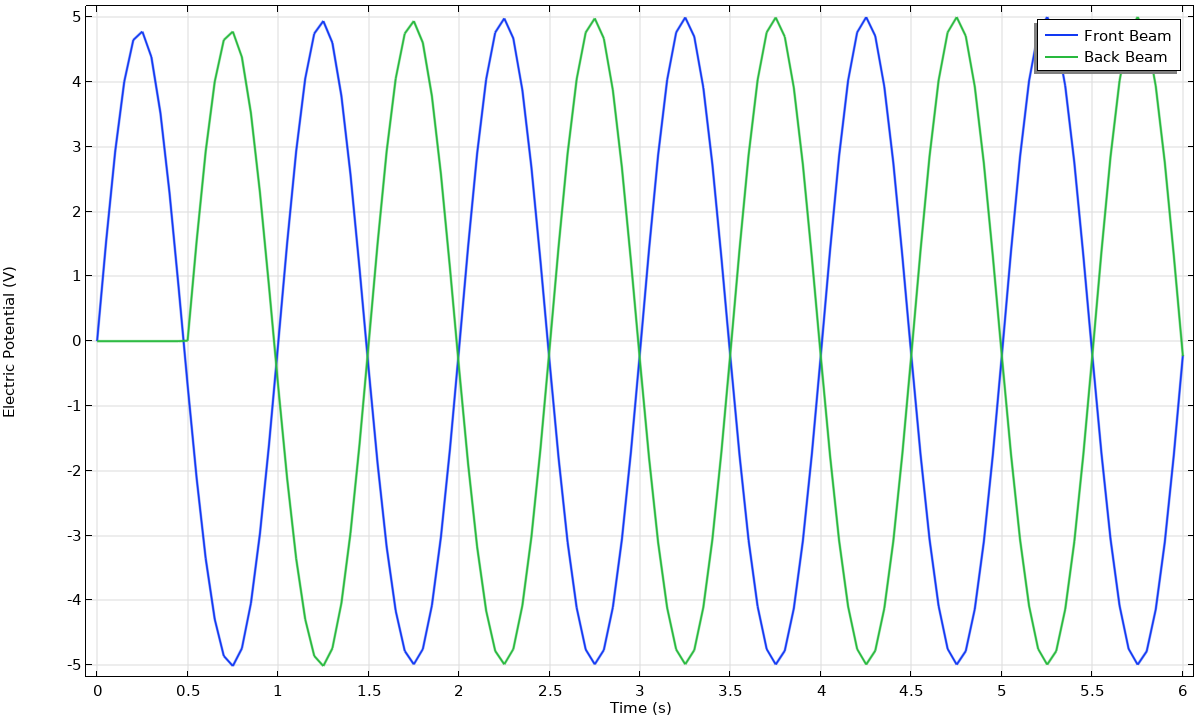
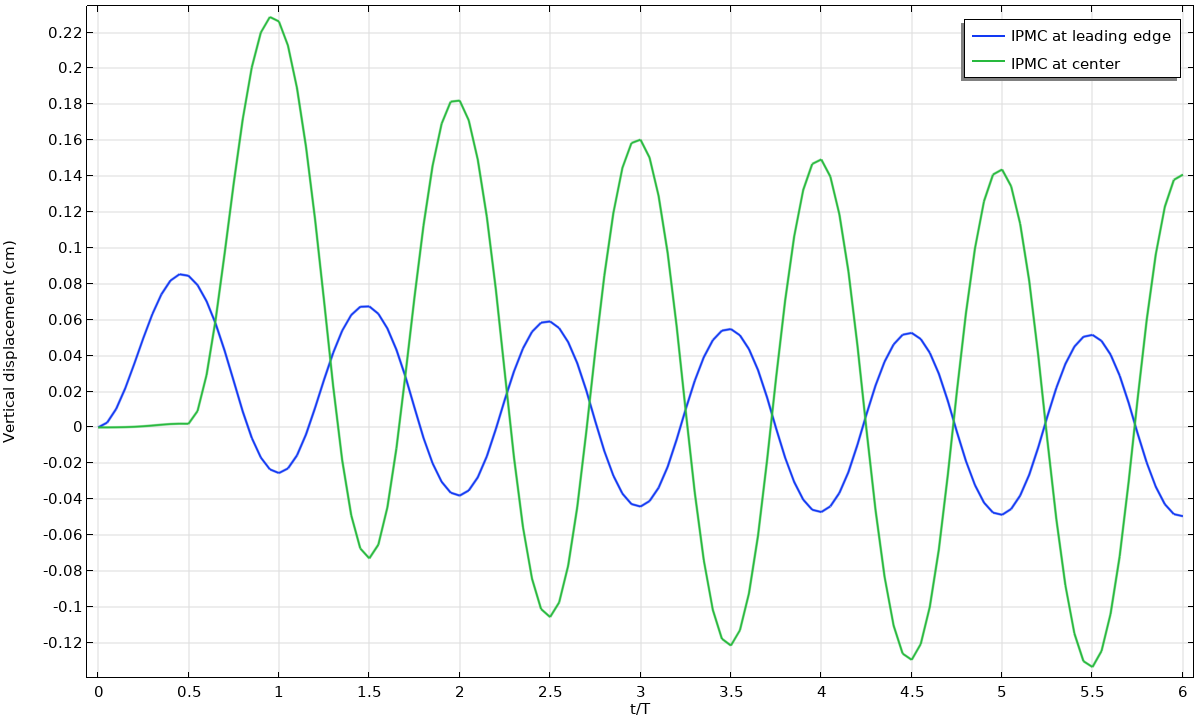
À gauche : Graphique montrant la tension d’entrée sinusoïdale avec un retard de phase entre les poutres IPMC. À droite : Un graphique montrant comment les poutres fléchissent cycliquement en raison du gonflement.
Le graphique ci-dessous montre la concentration de particules sur toute l’épaisseur de la poutre, avec la courbe de la poutre inférieure à gauche et la courbe de la poutre supérieure à droite. Celui-ci permet de mettre en lumière la présence de forts gradients de concentration près des interfaces des électrodes. Dans ces zones, les cations se répartissent de manière inégale dans l’épaisseur, induisant une déformation des poutres par gonflement qui entraine une flexion cyclique de celles-ci. Lorsqu’il y a une plus grande concentration de particules d’un côté, il faut plus d’espace pour les loger. C’est ce phénomène qui entraîne alors le rétrécissement et le gonflement du matériau afin de les loger dans les espaces subsistants.
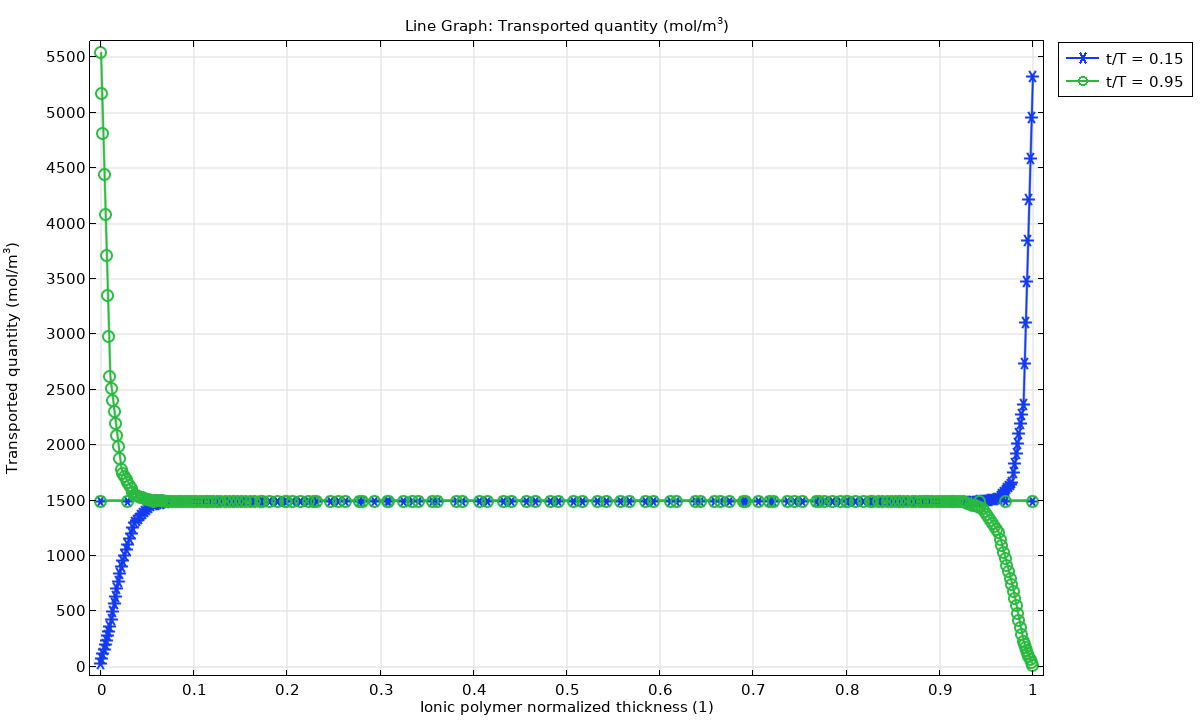 Graphique montrant la répartition inégale des cations dans l’épaisseur de chaque poutre, ce qui provoque la flexion de la poutre en raison du gonflement induit par la concentration.
Graphique montrant la répartition inégale des cations dans l’épaisseur de chaque poutre, ce qui provoque la flexion de la poutre en raison du gonflement induit par la concentration.
Prochaine étape
Vous souhaitez tester la modélisation d’une raie manta robotisée vous-même? Téléchargez le fichier MPH depuis la Bibliothèque d’applications:
Pour aller plus loin
- Apprenez-en plus sur le monde de la robotique molle avec ces ressources:
- En savoir plus sur les possibilités de la robotique molle: Soft Robotics Enables Flexible Robot Designs to Take Shape
- Découvrez comment les scientifiques utilisent des poissons robotisés pour concevoir des robots aquatiques: Studying the Swimming Patterns of Fish with Simulation

Commentaires (0)