
Si les voitures pouvant se déplacer seules ont longtemps été un incontournable de la science-fiction, à l’inverse d’autres inventions issues de l’imaginations des auteurs de fiction, les véhicules entièrement autonomes se sont rapprochés de manière surprenante de la réalité au cours des dix dernières années. Dans ce billet de blog, apprenez comment le logiciel COMSOL Multiphysics® peut être utilisé pour modéliser les lidar — une technologie clé permettant aux véhicules et robots autonomes d’appréhender leur environnement.
Vers des véhicules complètement autonomes
La norme industrielle pour l’évaluation de l’autonomie d’un véhicule a été développés par la Society of Automotive Engineers (SAE). Celle-ci catégorise six niveaux d’automatisation (commençant par le niveau 0) à partir de la répartition entre des tâches d’automatisation dynamique (DDT) pouvant être réalisées par une machine et celles qui nécessitent une intervention humaine:
- Niveau 0: pas d’automatisation de la conduite; toutes les tâches sont gérées par le conducteur humain
- Niveau 1: Assistance à la conduite soit pour la direction, soit pour l’accélération et la décélération (par exemple, régulateur de vitesse); toutes les autres tâches sont réalisées par le conducteur
- Niveau 2: Assistance à la conduite pour la direction et l’accélération et la décélération (par exemple, stationnement parallèle automatisé); toutes les autres tâches sont réalisées par le conducteur
- Niveau 3: Automatisation conditionnelle de la conduite; le conducteur humain surveille étroitement la voiture et intervient si nécessaire
- Niveau 4: Automatisation poussée de la conduite; le conducteur humain n’a pas besoin d’intervenir
- Niveau 5: Automatisation complète de la conduite; il n’est pas nécessaire qu’un humain soit assis sur le siège avant
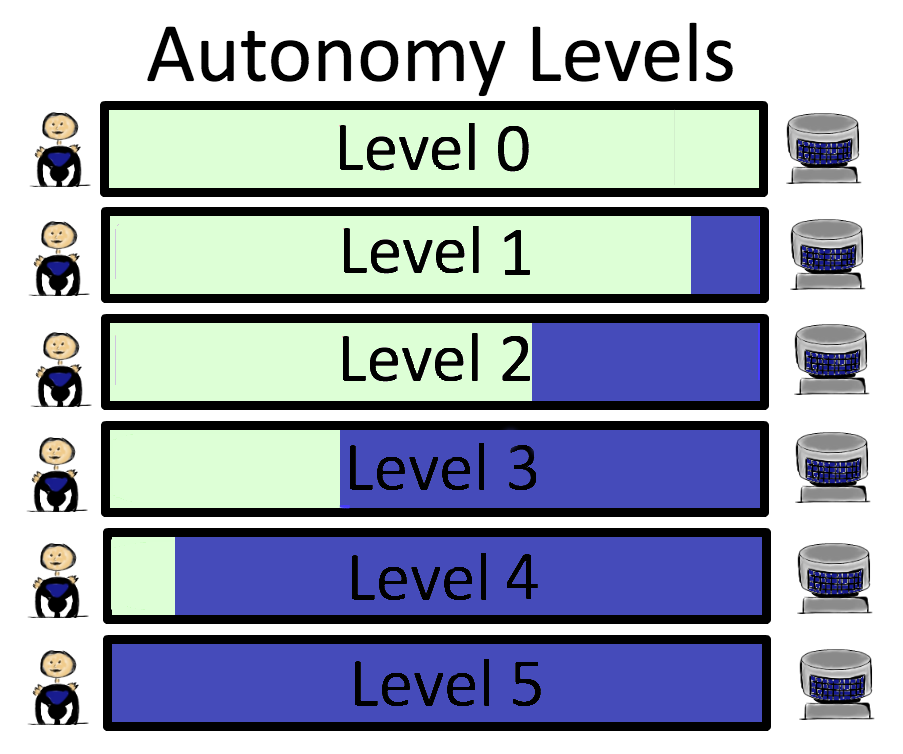 Illustration montrant les six niveaux de conduite autonome décrits par SAE.
Illustration montrant les six niveaux de conduite autonome décrits par SAE.
Entre les niveaux 2 et 3, il y a un changement important dans le système de classification. C’est là que le contrôleur principal du véhicule, responsable de la majeure partie des DDT, passe du conducteur humain au système du véhicule autonome. A cette date, quelques voitures autonomes ont atteint le niveau 4 de l’échelle SAE, mais aucune n’a atteint le niveau 5 correspondant à une autonomie complète.
 Illustration de bande dessinée décrivant une expérience de conduite de niveau 5.
Illustration de bande dessinée décrivant une expérience de conduite de niveau 5.
Avant qu’une expérience de conduite entièrement automatisée ne devienne réalité, il reste encore des obstacles à franchir. L’un des principaux défis du développement dans le domaine de la conduite autonome est l’optimisation des systèmes de détection et estimation de la distance par la lumière (lidar). Le lidar fonctionne de façon similaire au sonar et au radar mais s’appuie sur la lumière au lieu du son ou d’ondes radio. Son utilisation permet aux voitures autopilotées et autres robots autonomes d’avoir une perception en trois dimensions de leur environnement. Le lidar a également de nombreuses applications dans les secteurs pour lesquels il est nécessaire de surveiller le terrain, comme l’archéologie ou la sylviculture.
Comment fonctionne le lidar
Le principe de fonctionnement du lidar est d’une simplicité déroutante: on envoie un faisceau lumineux mince et intense dans une direction spécifique; on mesure le temps que prend la lumière rétrodiffusée à atteindre un récepteur placé à proximité immédiate de la source lumineuse (connu sous le terme de temps de vol); et à partir de ce temps de vol, on calcule la distance à la surface diffusante. On répète le processus pour un éventail d’angles de faisceaux et on compile les données. Le résultat est une image de notre environnement — à l’exception près que chaque pixel quantifie la profondeur et non la couleur comme dans une image classique.
Ici nous n’avons besoin que d’une seule formule simple pour convertir le temps de vol t en distance d. En considérant que la lumière se propage dans un milieu ayant un indice de réfraction constant n, on obtient:
où c_0 est la vitesse de la lumière dans le vide. Dans les applications ci-dessous, nous considérons que le lidar est dans l’air, nous fixons donc n=1.
 Un exemple d’appareil lidar attaché au toit d’un véhicule. Image par Arno Mikkor — Travail personnel. Sous licence CC BY 2.0, via Flickr Creative Commons.
Un exemple d’appareil lidar attaché au toit d’un véhicule. Image par Arno Mikkor — Travail personnel. Sous licence CC BY 2.0, via Flickr Creative Commons.
Il y a, cependant, un certain nombre de considérations pratiques requises pour un système lidar fonctionnel:
- Un laser pulsé est un choix évident pour une source lumineuse permettant un balayage rapide avec un faisceau mince, mais il est nécessaire de prêter attention aux risques oculaires; des longueurs d’ondes autour de 1550 nm sont généralement privilégiées puisqu’elles ne présentent pas de risque d’endommagement pour les yeux même en cas d’exposition directe.
- Pour faciliter une numérisation précise, l’angle du faisceau doit être contrôlable avec précision. Pour ce faire, des miroirs MEMS peuvent par exemple être utilisés.
- Une lumière sans danger pour les yeux avec une longueur d’onde plus grande peut être difficile à détecter du fait de la faible énergie des photons. L’utilisation d’une avalanche préamplifiée ou d’une photodiode PIN est courante.
Fondamentalement, un lidar fonctionne de façon similaire au radar et au sonar, mais comparé à ces technologies, le lidar offre des avantages clés. Par exemple, la longueur d’onde de la lumière utilisée par le lidar (généralement autour de 1550 nm) est beaucoup plus courte que celle des ondes radio utilisées par le radar ou que celle des ondes sonores utilisées par le sonar, ce qui permet d’obtenir une meilleure résolution. En outre, les ondes sonores sont bien plus atténuées par l’air que la lumière, le lidar a donc une plus longue portée. Le sonar est généralement utilisé exclusivement sous l’eau, où l’atténuation est bien plus faible. Enfin, la vitesse de la lumière dans l’air est beaucoup moins sensible aux variations de température et de pression que celle du son, les distances obtenues avec un lidar sont donc plus précises qu’avec un sonar.
Le lidar a aussi ses limites, qu’il convient de prendre en compte. A la différence du radar et du sonar, le lidar ne peut pas exploiter l’effet Doppler pour obtenir des informations concernant la vitesse des objets, il est donc nécessaire d’avoir un taux de rafraichissement suffisamment élevé pour être en mesure de détecter les vitesses des objets par le taux de variation de la distance. De plus, les surfaces transparentes ou semblables à des miroirs ne rétrodiffusent pas tellement la lumière, ce qui les rend difficiles à détecter par lidar.
Modéliser le lidar avec le module Ray Optics
L’algorithme temporel de lancer de rayons dans COMSOL Multiphysics® est idéalement conçu pour la modélisation du lidar. Comparé aux méthodes conventionnelles de lancer de rayons géométriques, une simulation plus précise du lidar est possible en accédant au temps d’arrivée réel de chaque rayon. Ceci est illustré dans l’image ci-dessous. Pour plus de détails à propos du module Ray Optics, nous vous invitons à consulter cet article de blog. Examinons deux exemples de modèles de lidar: une voiture détectant des obstacles à une intersection, et un aspirateur robot cartographiant la disposition d’une pièce. Dans les deux modèles, les dispositifs lidar sont implémentés comme des paires comprenant une fonctionnalité d’émission (sources lumineuses) et d’accumulation (détecteurs).
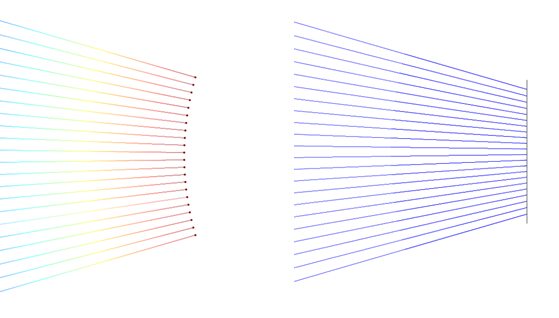 Illustration de la différence entre le lancer de rayons temporel dans COMSOL Multiphysics® (à gauche) et le lancer de rayons standard plan à plan (à droite).
Illustration de la différence entre le lancer de rayons temporel dans COMSOL Multiphysics® (à gauche) et le lancer de rayons standard plan à plan (à droite).
Détecter des obstacles avec le lidar
Ce modèle représente une voiture équipée d’un lidar qui détecte un piéton ainsi qu’une autre voiture à une intersection. Une animation du tracé des rayons et un graphique du signal temporel au niveau des trois détecteurs positionnés à l’avant sont présentés ci-dessous. Il convient de noter qu’un seul cycle de détection est considéré ici et qu’en réalité, ce processus est répété plusieurs fois par seconde.
Animation des résultats de lancer de rayons pour le modèle de lidar de voiture.
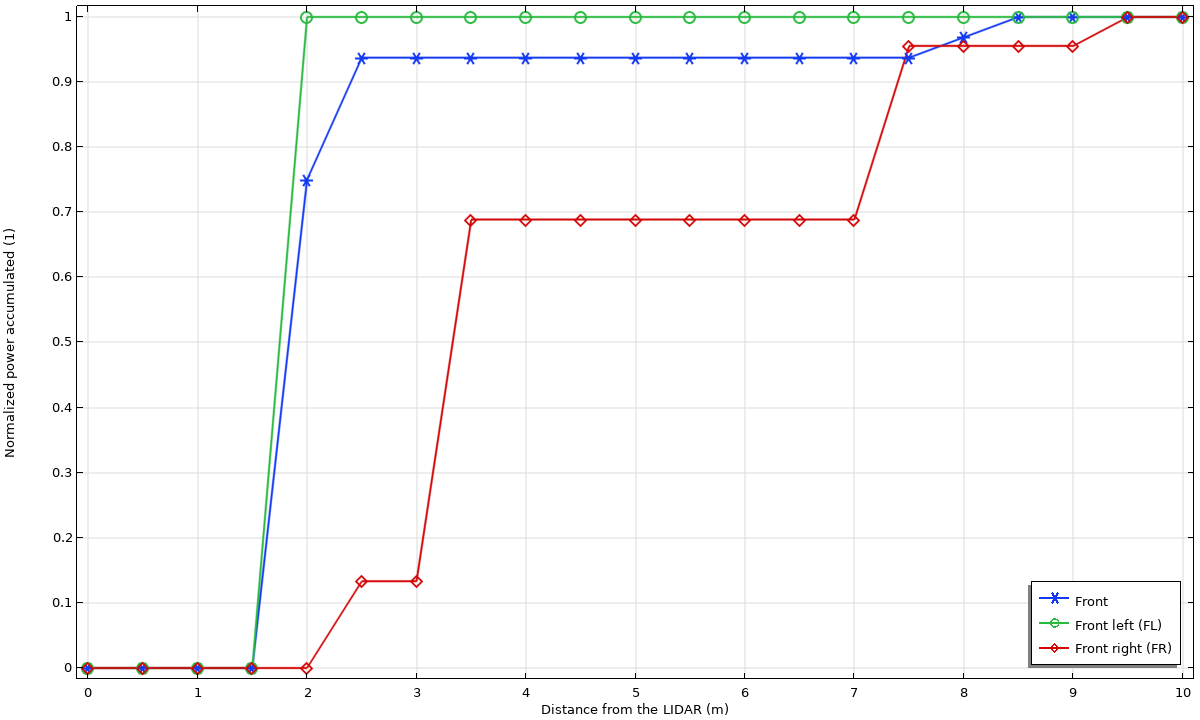 Graphique montrant le signal détecté par les trois détecteurs placés à l’avant. Les détecteurs avant et avant-gauche atteignent leur pic à 2 m, détectant le piéton. Le détecteur avant-droit atteint son maximum à 7.5 m, détectant l’autre voiture.
Graphique montrant le signal détecté par les trois détecteurs placés à l’avant. Les détecteurs avant et avant-gauche atteignent leur pic à 2 m, détectant le piéton. Le détecteur avant-droit atteint son maximum à 7.5 m, détectant l’autre voiture.
Scanner une pièce avec un lidar
Notre second exemple de modèle montre un aspirateur robot scannant une pièce à l’aide d’un dispositif lidar rotatif. Nous observons dans l’image ci-dessous que la disposition de la pièce peut être retrouvée grâce à un affichage du temps de vol en fonction de l’angle de rotation.
Une animation du balayage angulaire du lidar montrant la trajectoire des rayons.
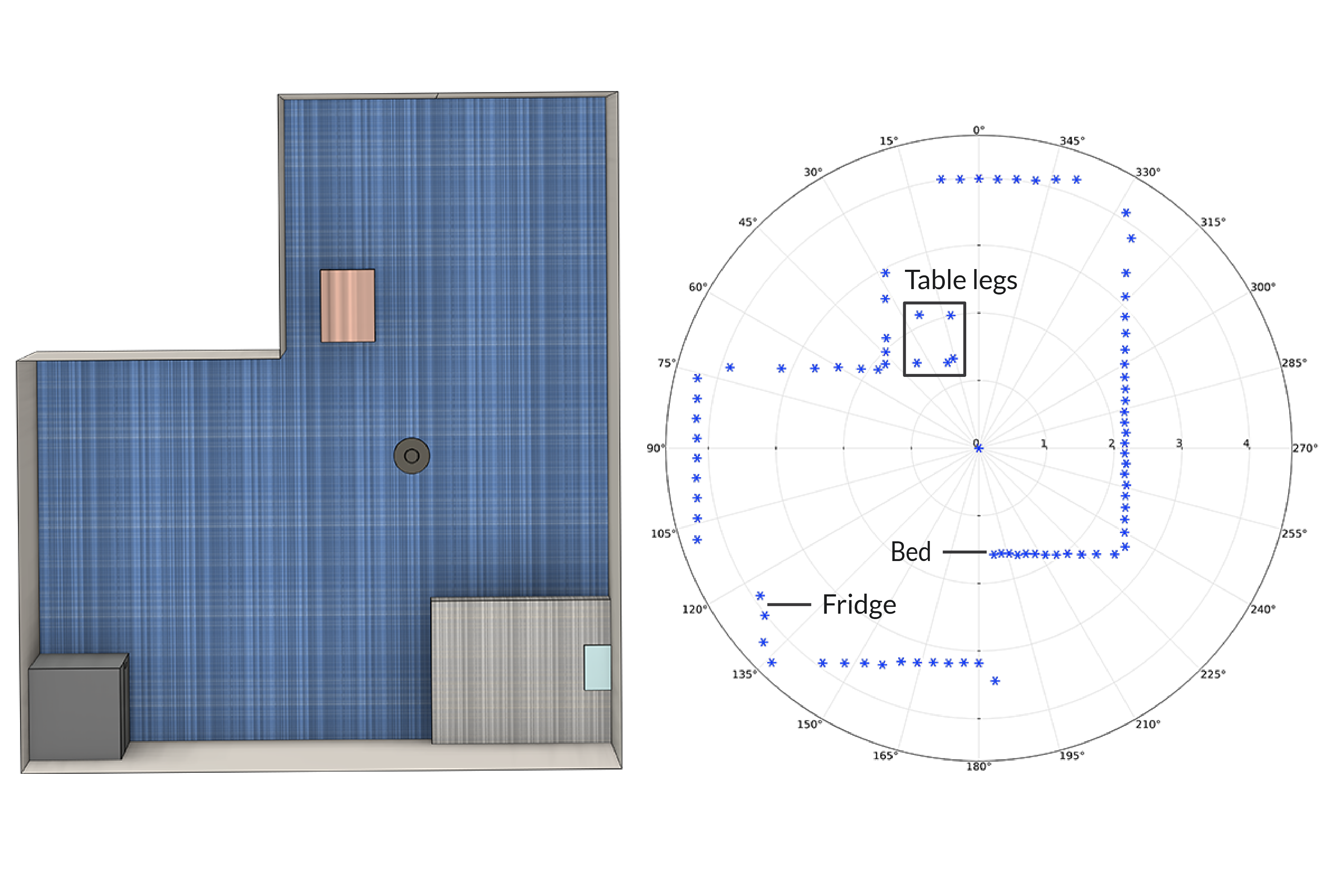
Une comparaison entre la disposition de la pièce (à gauche) et le temps de vol (distance) en fonction de l’angle du dispositif lidar (à droite).
Prochaines étapes
Modélisez à votre tour un système lidar. A partir de la Bibliothèque de modèles, vous pouvez télécharger les fichiers liés aux tutoriels vus dans cet article de blog:

Commentaires (0)