Les systèmes microfluidiques peuvent transporter les fluides à travers des microcanaux souvent plus fins qu’un cheveu humain. Les micropompes sont des composants clés de ces systèmes dont les domaines d’application vont de la manipulation de fluides biologiques au refroidissement microélectronique. La simulation multiphysique permet aux ingénieurs de concevoir des micropompes avec la précision nécessaire pour pouvoir travailler à une si petite échelle.
Note : La version originale de cet article a été publiée le 17 Juillet 2015. Il a depuis été mis à jour avec de nouveaux textes et de nouvelles versions d’images du modèle.
Défis de conception d’une micropompe
La manipulation des fluides par mélange, séparation et pompage à travers des microcanaux pose certains défis en matière de conception. Les ingénieurs doivent créer des micropompes qui répondent aux exigences de miniaturisation tout en offrant des performances optimales. Les pompes sans clapet sont souvent choisies dans les applications de micropompes en raison de leur conception simple et de leur adaptabilité aux matériaux biologiques qui nécessitent d’être traités avec précaution. Cependant, il est difficile de contrôler un écoulement de fluide unidirectionnel et régulier sans les clapets anti-retour d’une pompe traditionnelle. Les micropompes sans clapet s’appuient plutôt sur l’interaction entre la géométrie du mécanisme et le fluide pour obtenir un écoulement unidirectionnel. De ce fait, les pompes sans clapet sont inefficaces dans le cas des fluides à faible nombre de Reynolds, ou lorsqu’elles impliquent des fluides visqueux, des petites échelles de longueur ou des faibles débits. Veryst Engineering, un Consultant Certifié COMSOL, a développé un modèle de micropompe sans clapet qui contourne ces limitations de conception.
Dans le modèle de Veryst, la micropompe crée un mouvement oscillatoire du fluide qui est induit, par exemple, par un mécanisme de pompage alternatif. Le fluide pénètre dans un canal horizontal muni de micro-languettes flexibles positionnées à un angle incliné de chaque côté de la micropompe. Les micro-languettes se courbent sous l’effet du mouvement du fluide, ce qui entraîne un écoulement unidirectionnel sans qu’il n’y ait besoin de synchroniser de manière complexe les mécanismes d’actionnement, comme c’est le cas dans un système avec clapet.
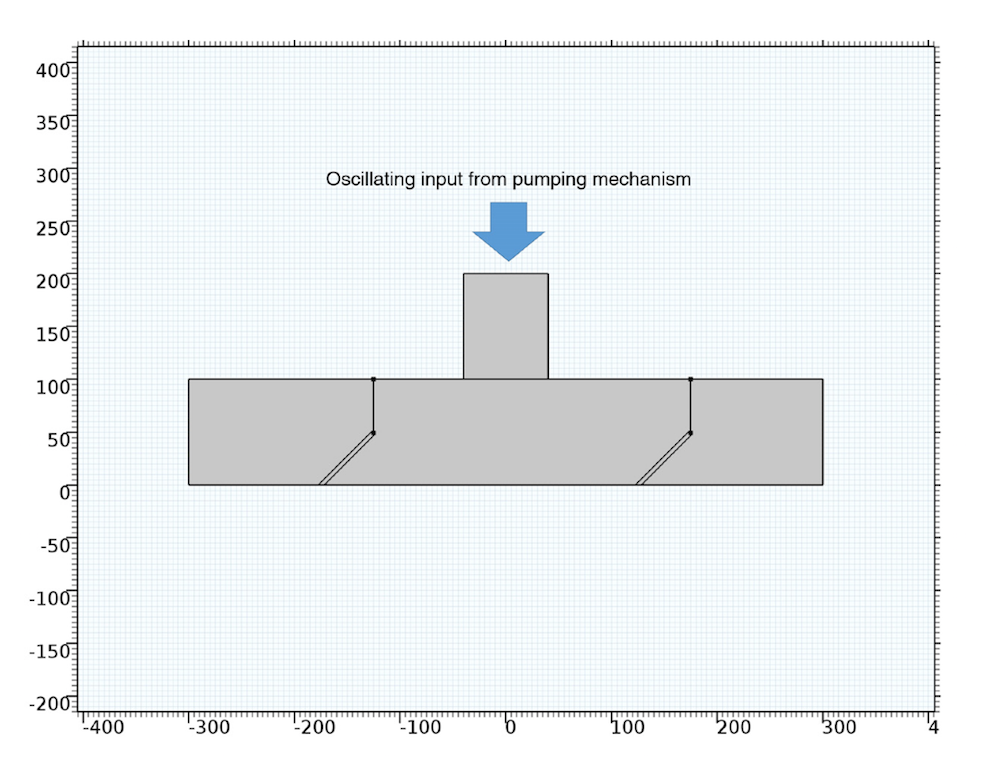 La géométrie du tutoriel de micropompe.
La géométrie du tutoriel de micropompe.
Calculs des performances de la micropompe grâce à la simulation
Dans ce modèle, le nombre de Reynolds est fixé à 16 mais le modèle reste valide pour les nombres de Reynolds très inférieurs à 1. L’interface Interaction fluide-structure du logiciel COMSOL Multiphysics® est utilisée pour définir l’écoulement oscillatoire en entrée et les propriétés des micro-languettes. Elle permet ensuite de calculer la réponse des languettes et son effet sur l’écoulement du fluide. L’interface EDO et EAD globales calcule le volume net pompé au cours du temps pour un cycle de pompage de deux secondes.
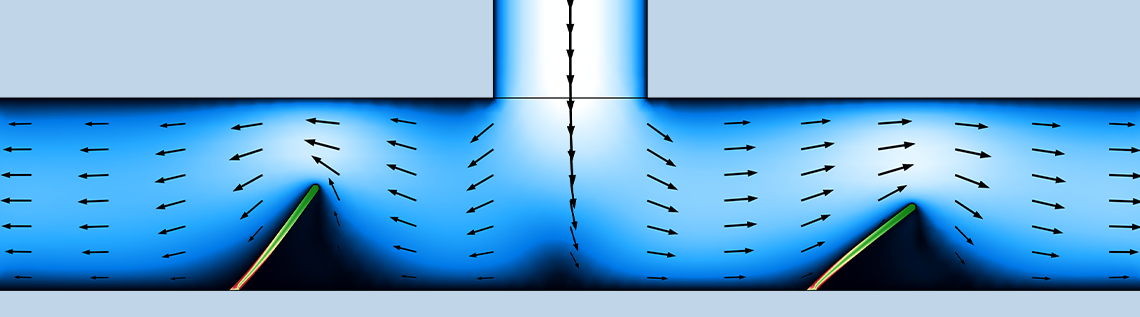
La simulation débute par une phase descendante de la micropompe, qui consiste à pousser le fluide vers le bas dans la chambre verticale. Cette action provoque une courbure vers le bas de la micro-languette à droite et une courbure vers le haut de celle à gauche. Dans cette position, la micro-languette à gauche bloque le flux vers la gauche et le canal d’écoulement à droite est élargi. Cette configuration entraîne naturellement une grande partie du fluide à s’écouler vers la droite, car il s’agit de la voie présentant le moins de résistance.
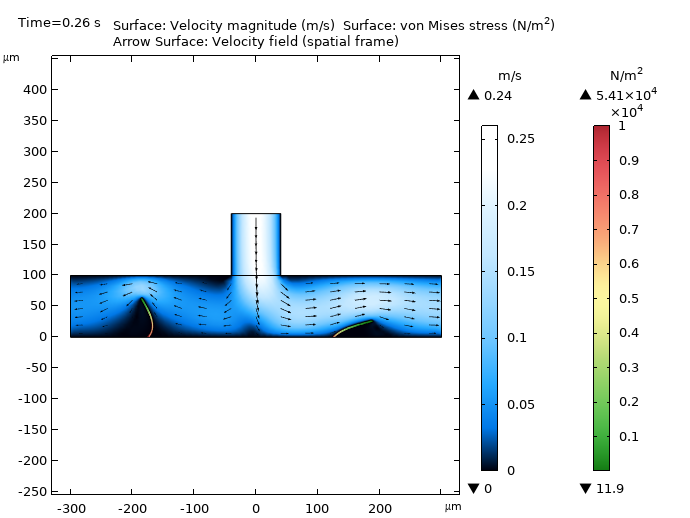 Le champ et la norme de la vitesse ainsi que les contraintes de von Mises sont mesurés durant la phase descendante du pompage, où la majorité du fluide est poussée vers la droite.
Le champ et la norme de la vitesse ainsi que les contraintes de von Mises sont mesurés durant la phase descendante du pompage, où la majorité du fluide est poussée vers la droite.
Durant la phase ascendante du pompage, le fluide est pompé vers le haut dans la chambre verticale. Cet écoulement ascendant provoque la flexion des microlanguettes dans des directions opposées à celles observées durant la phase descendante. Ce changement n’affecte pas la direction globale de l’écoulement car la majorité du fluide est aspirée dans le canal depuis l’entrée située à gauche.
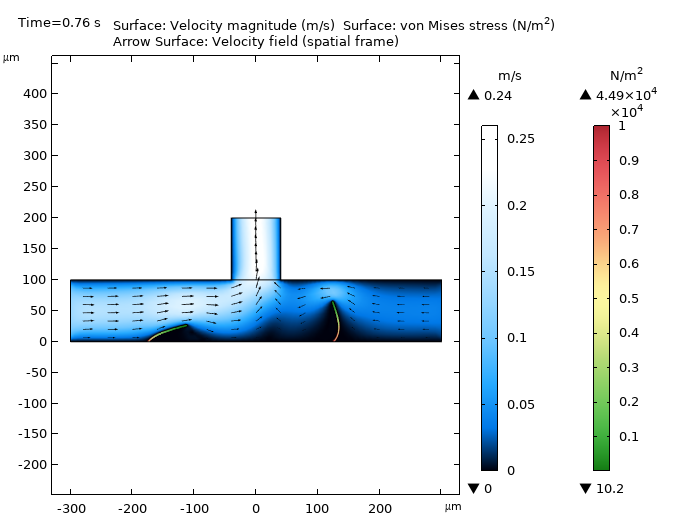 A l’instant 0.76 secondes, le fluide est aspiré vers le haut, et s’écoule en majorité depuis l’entrée à gauche durant la phase ascendante.
A l’instant 0.76 secondes, le fluide est aspiré vers le haut, et s’écoule en majorité depuis l’entrée à gauche durant la phase ascendante.
En raison de la déformation naturelle des micro-languettes causée par le fluide en mouvement, ces deux étapes ont permis de créer un écoulement orienté de gauche à droite. Mais dans quelle mesure le fonctionnement de la micropompe a-t-il permit de maintenir cet écoulement pendant toute la durée de la simulation ?
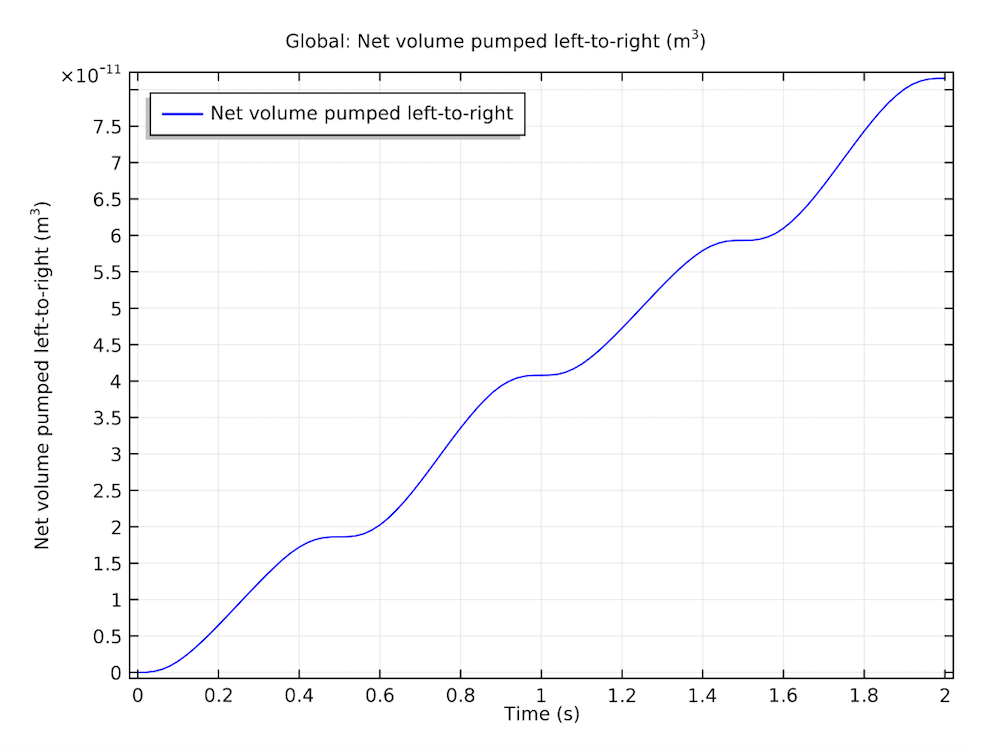 Le volume net de fluide pompé de gauche à droite, en fonction du temps.
Le volume net de fluide pompé de gauche à droite, en fonction du temps.
Au cours du test de deux secondes, le volume net pompé de gauche à droite a continuellement augmenté, avec un débit net plus élevé lors des pics de vitesse de pompage. Cela démontre que le modèle de micropompe sans clapet peut fonctionner efficacement pour un nombre de Reynolds aussi faible, contournant ainsi les limitations habituelles de nombreuses micropompes sans clapet.
Ce type de micropompe sans clapet pourrait avoir de nombreuses applications futures, notamment celle de servir de système d’alimentation fluidique. Dans un tel scénario, une micropompe pourrait prélever du liquide à partir d’un réservoir de gouttelettes situé à gauche et le transporter à travers un canal microfluidique vers une sortie située à droite.
Prochaine étape
Dans cet article, nous n’avons présenté qu’une partie des résultats de simulation. En testant le tutoriel mis en place par Veryst Engineering, vous pouvez visualiser le fonctionnement d’une micropompe sans clapet dans différents scénarios.

Commentaires (0)