
L’Institut Fraunhofer pour les essais non destructifs (IZFP), basé en Allemagne, utilise la modélisation et la simulation dans la recherche appliquée au développement de capteurs intelligents et de systèmes de données pour la sécurité, la durabilité et l’efficacité. Sascha Thieltges, de l’IZFP, s’est entretenu avec COMSOL au sujet des travaux de son équipe dans le domaine de la détection de la corrosion.
Cet article de blog présente une méthode pour détecter la corrosion dans les canalisations encastrées à l’aide d’ondes guidées générées par des systèmes basés sur la technologie EMAT (electromagnetic acoustic transducer). On y expose les défis et les risques de conception associés à ces systèmes de conduites, ainsi que les aspects analytiques et numériques sous-jacents. L’article illustre ensuite l’analyse d’un problèmes d’onde guidée dans le logiciel COMSOL Multiphysics®.
Détection précoce de la corrosion: la clé d’une infrastructure durable
Les conduites de distribution d’énergie, d’eau et de procédés industriels constituent la colonne vertébrale des infrastructures modernes. La plupart de ces systèmes ont été installés lors de la seconde moitié du XXe siècle et sont actuellement grandement affectés par le vieillissement, les contraintes mécaniques et les dégradations environnementales (Réf. 1). L’un des mécanismes de défaillance les plus critiques est l’amincissement des parois induit par la corrosion, qui peut passer inaperçu jusqu’à ce qu’il entraîne une défaillance structurelle (Réf. 2–4).
Plus cette dégradation est identifiée tôt, plus la maintenance peut être planifiée de manière efficace et rentable. Du point de vue environnemental, la détection précoce est tout aussi importante. Des études prévoient que d’ici 2030, les émissions de CO2 liées à la production d’acier de remplacement des infrastructures corrodées pourraient représenter jusqu’à 5% du total des émissions mondiales liées à l’acier (Réf. 5). Le changement climatique aggrave encore le problème, car les phénomènes météorologiques extrêmes sont de plus en plus fréquents, exerçant une pression croissante sur des systèmes vieillissants et insuffisamment surveillés.
Les méthodes d’inspection traditionnelles telles que les examens visuels ou les essais par ultrasons localisés sont limitées lorsqu’elles sont appliquées à des sections de conduites encastrées, isolées ou plus généralement inaccessibles, comme le montrent les photos ci-dessous. Pour évaluer de manière fiable l’état interne de ces systèmes, il est nécessaire de recourir à des méthodes avancées d’essais non destructifs (NDT), c’est-à-dire à des techniques permettant de sonder sur des grandes distances sans accès direct à la surface.

Canalisations difficiles d’accès sous un pont (à gauche) et une canalisation encastrée dans du béton (à droite).
Les ondes ultrasonores guidées répondent à ce besoin. Elles peuvent se propager sur plusieurs mètres, interagir avec les discontinuités des matériaux et révéler les premiers signes de corrosion. À l’Institut Fraunhofer pour les essais non destructifs (Fraunhofer IZFP), une équipe de projet dirigée par Sascha Thieltges développe et perfectionne cette approche afin de permettre une surveillance fiable de l’état des structures, même dans des conditions extrêmes et contraignantes.
Risques latents dans les canalisations encastrées
L’une des applications d’essai non destructif les plus contraignantes concerne l’inspection des conduites encastrées, telles que celles utilisées dans les centrales hydroélectriques en montagne ou les systèmes de distribution à longue distance. Dans ces installations, un tunnel est creusé dans la roche solide, puis une conduite en acier de grand diamètre (généralement entre 800 mm et 3 m) est placé à l’intérieur. L’espace entre la conduite et la paroi du tunnel est ensuite rempli de béton afin d’assurer l’intégrité structurelle et le transfert de charge. L’extrémité d’un exemple de ce type de conduite est illustrée ci-dessous.
 Une canalisation de chauffage urbain encastrée dans un isolant.
Une canalisation de chauffage urbain encastrée dans un isolant.
Cette méthode de construction présente un risque latent: l’eau qui s’infiltre à travers les microfissures dans la roche environnante peut s’accumuler le long de la surface extérieure de la conduite, provoquant à terme une corrosion externe localisée. Comme ces conduites s’étendent souvent sur plusieurs centaines de mètres, une inspection manuelle n’est pas envisageable. « Les ultrasons piézoélectriques conventionnels ne fournissent que des informations localisées et ils ne permettent tout simplement pas une couverture complète », explique Mr Thieltges.
Le défi principal est clair: comment évaluer l’état de ces conduites lorsque leur surface extérieure est inaccessible et que l’inspection depuis l’intérieur ne peut se faire que sur de courtes distances ? Lors des arrêts programmés, la conduite est vidangée, nettoyée et inspectée visuellement, et des mesures ponctuelles par ultrasons sont effectuées. Cependant, il est impraticable de réaliser une cartographie complète de l’épaisseur de la paroi sur toute la longueur en raison du coût des temps d’arrêt. « Toute interruption affecte directement les activités et les revenus », souligne Mr Thieltges.
C’est précisément là que les ondes guidées (GW), combinées aux tests électromagnétiques par ultrasons, s’avèrent précieuses. Les ondes guidées peuvent se propager sur plusieurs mètres le long de la conduite tout en sondant l’épaisseur totale de la paroi. Les systèmes basés sur des EMAT génèrent ces ondes sans contact physique ni moyen de raccordement, ce qui constitue un avantage essentiel dans les environnements souterrains ou difficiles d’accès.
La solution: des ondes guidées générées par EMAT
Parmi les différentes familles d’ondes guidées, les modes horizontaux de cisaillement (SH : shear horizontal) se sont révélés prometteurs dans l’inspection des pipelines (Réf. 6). Ces modes apparaissent comme des modes propres de l’équation d’onde élastodynamique avec des conditions aux limites représentatives de géométries planes ou cylindriques. Plutôt qu’une solution unique, il existe un ensemble discret de modes, chacun caractérisé par un profil de déplacement unique sur toute l’épaisseur de la paroi.
Les champs de déplacement des modes pairs et impairs peuvent être exprimés sous la forme suivante:
(1)
(2)
avec
(3)
où d_0 est l’épaisseur de paroi, n est l’indice du mode, et A_0 est l’amplitude d’excitation.
Les équations 1–2 décrivent une onde guidée de cisaillement polarisée horizontalement dans la direction x, se propageant dans la direction y avec une distribution d’amplitude sinusoïdale ou cosinusoïdale le long de l’axe z.
Le graphique ci-dessous illustre les déformées modales pour SH_0, SH_1, et SH_2 sur l’épaisseur de la paroi. Alors que SH_0 présente un profil de déplacement latéral uniforme, les modes d’ordre supérieur tels que SH_1 et SH_2 introduisent un déplacement dépendant de l’épaisseur, ce qui mène à des caractéristiques de propagation plus complexes.
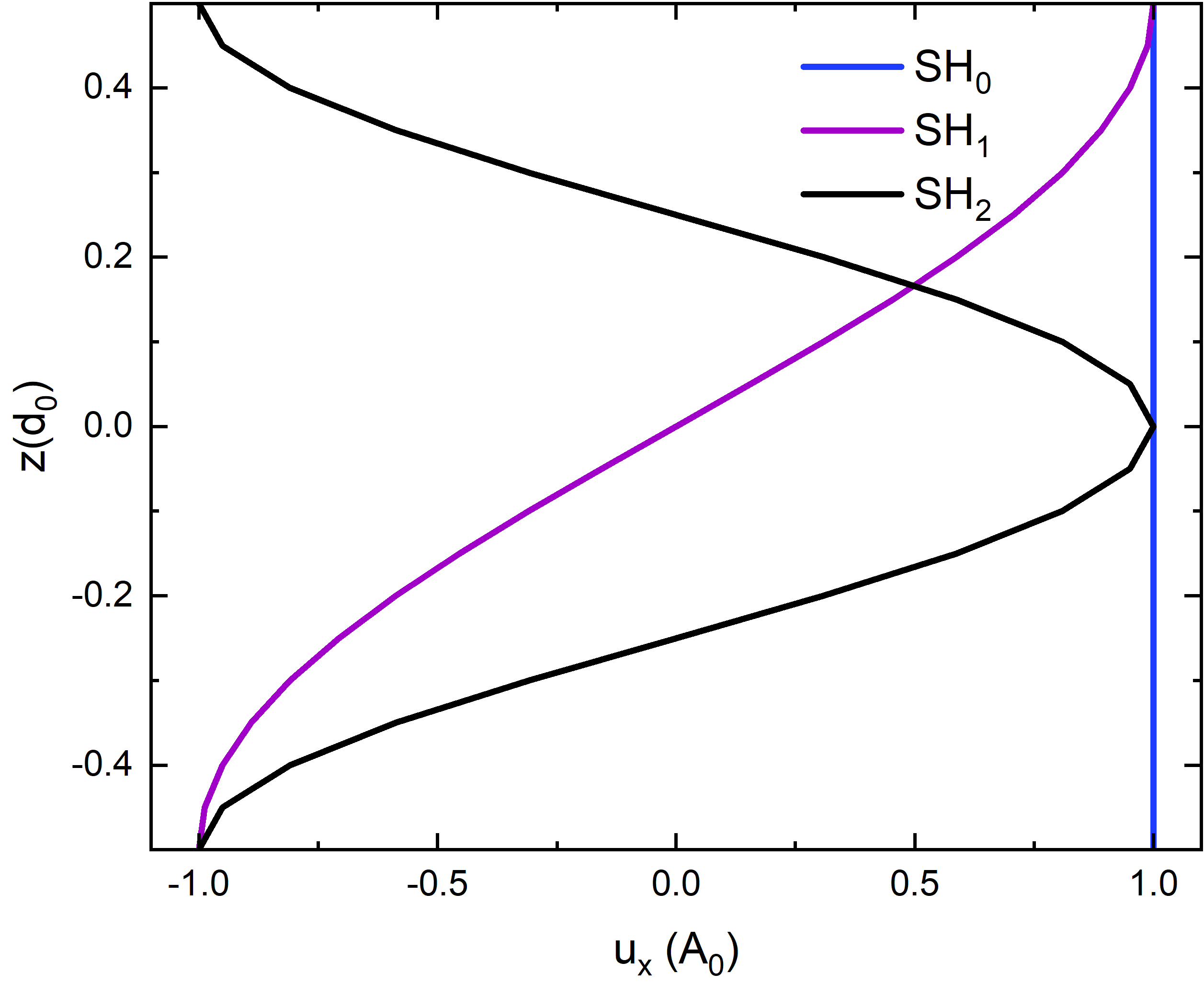 Distribution de l’amplitude de déflexion des modes SH0, SH1, et SH2 à travers la section.
Distribution de l’amplitude de déflexion des modes SH0, SH1, et SH2 à travers la section.
Une propriété déterminante des modes SH d’ordre supérieur (n>0) concerne leur nature dispersive. La vitesse de phase c_P et la vitesse de groupe c_G varient en fonction de la fréquence d’excitation f et de l’épaisseur de paroi d_0:
(4)
(5)
où c_T est la vitesse de l’onde transversale.
Le graphique ci-dessous présente les courbes de dispersion (Equations 4-5) avec des points de fonctionnement représentatifs mis en évidence aux longueurs d’onde de 32 mm et 24 mm. Seules les ondes guidées se trouvant sur les courbes de dispersion sont physiquement prises en compte, ce qui signifie que la longueur d’onde et la fréquence doivent être soigneusement sélectionnées.
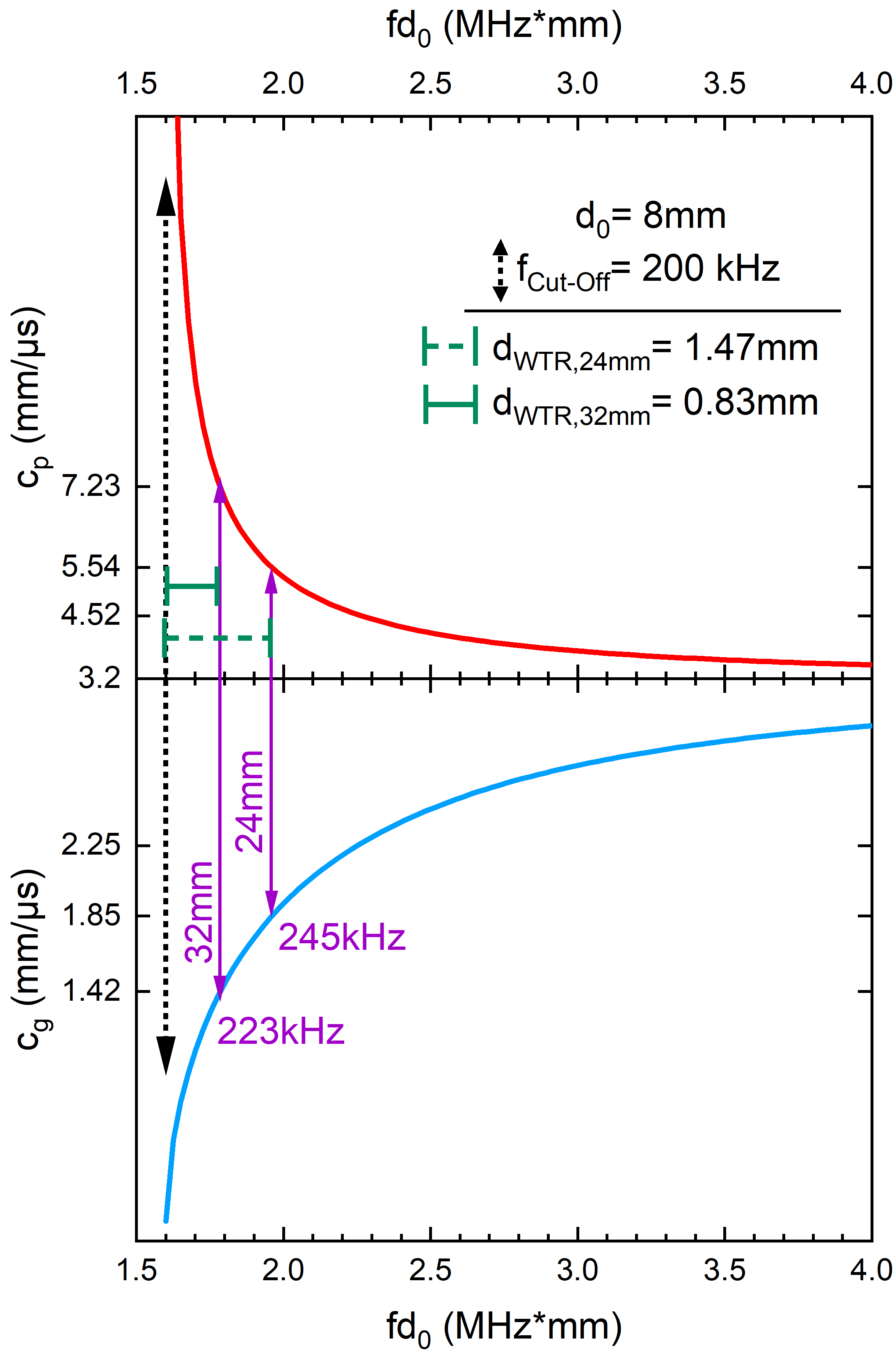 Courbes de dispersion selon Eqs. 3-4. Les points de fonctionnement pour une GW de longueur d’onde 32 mm et 24 mm sont représentés en violet.
Courbes de dispersion selon Eqs. 3-4. Les points de fonctionnement pour une GW de longueur d’onde 32 mm et 24 mm sont représentés en violet.
Pour une épaisseur de paroi de d_0=8mm, cela correspond à des fréquences d’excitation de 223kHz (pour \lambda=32mm) et 245kHz (pour \lambda=24mm). Si l’épaisseur de paroi varie selon la distance de propagation, le point de fonctionnement est décalé le long de la courbe de dispersion, altérant à la fois c_P et c_G.
Si l’épaisseur de paroi augmente, les deux vitesses tendent asymptotiquement vers 3.2mm/µs (SH_0 mode). Si l’épaisseur de paroi diminue, cependant, le décalage du point de fonctionnement est limité. Lorsque la réduction d’épaisseur de paroi (WTR : wall thickness reduction) est en-dessous d’une certaine valeur critique, les ondes guidées ayant une certaine longueur d’onde ne peuvent plus se propager. Pour \lambda=24mm, la réduction d’épaisseur de paroi maximale est d_{WTR,24mm}=1.47mm, alors que pour \lambda=32mm, la limite est d_{WTR,32mm}=0.83mm.
En pratique, la corrosion entraîne généralement des zones locales de réduction d’épaisseur de paroi. Ces zones agissent comme des centres de diffusion, produisant une réflexion partielle de l’onde guidée. L’amplitude de la réflexion dépend de la géométrie du défaut, de la longueur d’onde sélectionnée et du mode de propagation. Si la réduction locale d’épaisseur de paroi dépasse la valeur admissible, une conversion de mode se produit dans la zone du défaut et le signal réfléchi peut contenir plusieurs composantes modales. « La conception du capteur est ici cruciale. Elle définit le point de fonctionnement et détermine donc directement quels sont les scénarios de corrosion qui peuvent être détectés », explique Mr Thieltges.
L’excitation requise est fournie par des EMAT. Un EMAT se compose de bobines haute fréquence (HF) pour l’excitation et la réception, combinées à un aimant statique basse fréquence. Un courant haute fréquence (jusqu’à 50 A crête à crête au-dessus de 100 kHz) dans la bobine génère un champ magnétique dynamique. En présence du champ statique, les forces de Lorentz (ou forces magnétostrictives, selon le matériau) agissent à la surface et génèrent l’onde guidée. Le principe de fonctionnement est illustré schématiquement ci-dessous. La disposition décalée des bobines RF (bleues et vertes) par rapport au champ magnétique statique (flèche noire) permet une génération unidirectionnelle des ondes guidées (flèche rouge).
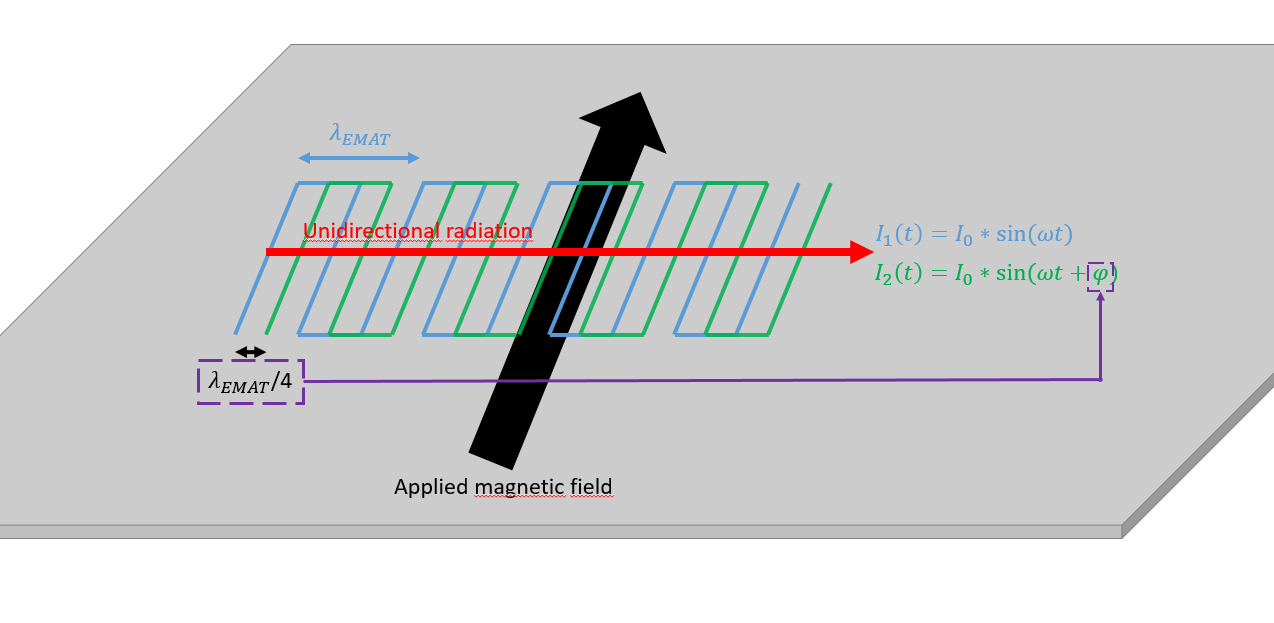 Schéma du principe de fonctionnement d’un EMAT.
Schéma du principe de fonctionnement d’un EMAT.
Les ondes guidées, lorsqu’elles sont générées et réceptionnées de cette manière, constituent une méthode polyvalente pour la détection et la quantification de la corrosion. Cependant, la conception d’un système d’inspection efficace à partir d’EMAT reste une tâche très complexe.
Les principaux défis techniques à ce stade du processus de modélisation peuvent être résumés par les questions suivantes:
- Comment optimiser la géométrie pour obtenir un faisceau étroit avec une excitation unidirectionnelle ?
- Comment maximiser l’amplitude de l’onde, en améliorant par exemple le couplage des forces de Lorentz ou la magnétostriction ?
- Quels sont les modes et les points de fonctionnement dans le diagramme de dispersion qui sont les plus sensibles à un scénario de défaut donné ?
- Comment les ondes guidées interagissent avec les sites de corrosion en termes de réflexion, d’atténuation et de conversion de mode ?
- Comment le milieu environnant tel que le béton ou l’isolant peut altérer la propagation d’onde (via par exemple des fuites d’onde) et comment atténuer ces effets ?
La simulation comme outil clé: une étude d’onde guidée dans COMSOL Multiphysics®
Dans ce contexte, il serait trop coûteux en termes de puissance de calcul de résoudre entièrement le capteur EMAT, comprenant la configuration des bobines et les interactions électromagnétiques couplées. Un modèle simplifié a donc été choisi dans un premier temps, axé exclusivement sur la propagation des ondes et l’interaction des ondes guidées avec les réductions locales d’épaisseur de paroi dans des conduites encastrées dans du béton. « C’est là que les simulations entrent en jeu, car elles nous permettent systématiquement d’étudier des questions spécifiques restées en suspens », explique Mr Thieltges.
Au lieu de modéliser explicitement l’EMAT, son effet a été représenté par des efforts surfaciques imposés, appliqués sous forme de chargements linéaires sur la surface interne de la conduite. Étant donné que les ondes de cisaillement horizontales guidées traversent toute l’épaisseur de la paroi, le côté d’excitation (intérieur ou extérieur) n’a pas d’importance. « En ajustant le décalage spatial et le déphasage temporel de ces chargements, nous avons pu exciter de manière ciblée le mode SH_0 ou SH_1 et analyser leur comportement de réflexion et de diffusion lors des réductions d’épaisseur de paroi. Cette approche isole les effets physiques clés tout en maintenant le coût de calcul à un niveau raisonnable », ajoute M. Thieltges.
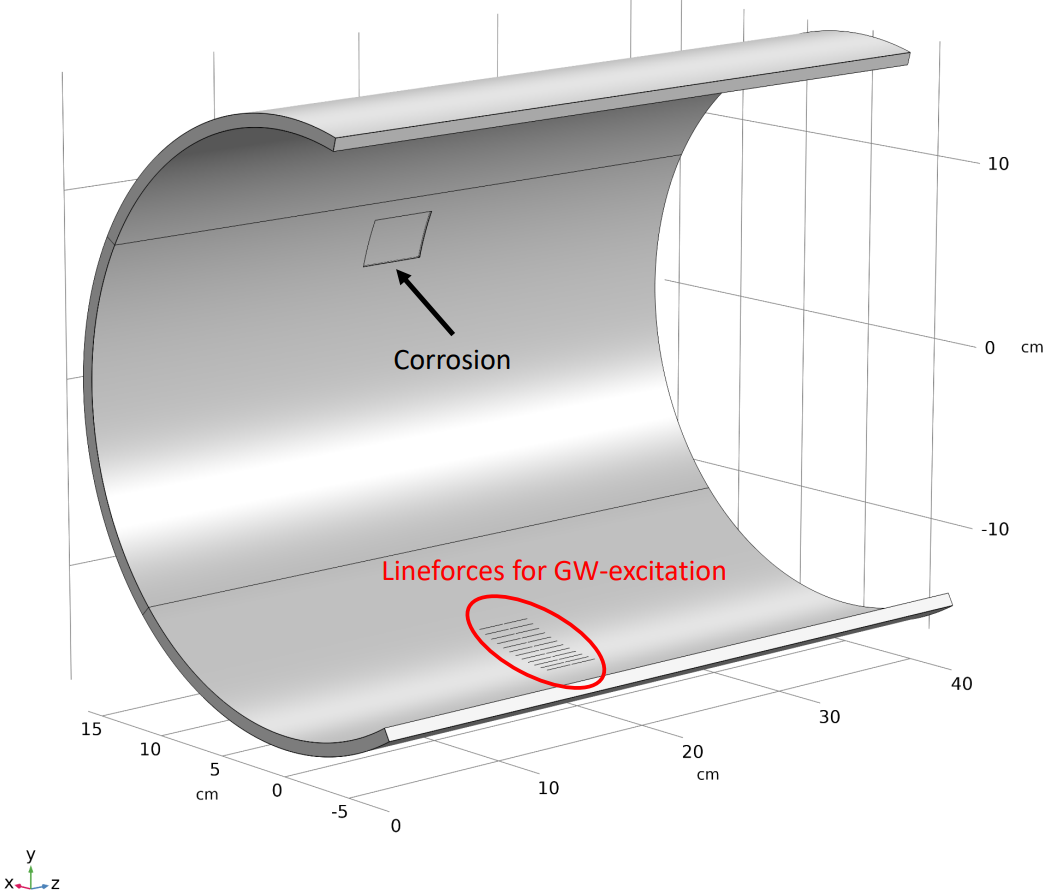
Pour obtenir une excitation unidirectionnelle des ondes, quatre segments individuels d’efforts linéiques ont été mis en œuvre, chacun étant décalé dans l’espace et déphasé temporellement, comme illustré dans l’image ci-dessous. Le champ d’ondes étant piloté, la géométrie de la conduite peut être réduite, avec des conditions aux limites faiblement réfléchissantes appliquées dans la direction circonférentielle afin de supprimer les réflexions parasites aux bords. Le modèle a été construit en 3D et résolu à l’aide du module Structural Mechanics, un add-on de COMSOL Multiphysics®, avec une étude temporelle (analyse transitoire).
Une représentation précise des phénomènes d’ondes guidées nécessite une attention particulière à la résolution spatiale et temporelle. La taille du maillage et le pas de temps doivent être choisis de manière à résoudre les longueurs d’onde présentes les plus courtes et à minimiser toute erreur numérique. Pour avoir des conseils pratiques sur la discrétisation du maillage et les stratégies de résolution dans les simulations d’ondes guidées, consultez l’article de la base de connaissances de COMSOL (Réf. 7).
Comportement des réflexions des modes SH0 et SH1
La conduite simulée a un diamètre de 323 mm et une épaisseur de paroi nominale de d_0=7.1mm. La réduction d’épaisseur de paroi (WTR) varie entre 5% et 90% de l’épaisseur nominale, tandis que les modes SH0 (160 kHz) et SH1 (277 kHz) sont excités de manière ciblée. Afin de suivre la réponse de l’onde guidée, une sonde ponctuelle est placée sur la surface externe de la conduite entre la zone d’excitation et le site de corrosion, enregistrant l’amplitude de déplacement dans la direction z en fonction du temps.
L’animation à gauche ci-dessous montre la propagation et l’interaction du mode SH₀ avec une WTR induite par la corrosion de 80%, alors que l’animation à droite ci-dessous montre le mode SH₁ qui interagit avec une WTR locale de 15%.
Les signaux temporels (A-scans) obtenus à partir de la sonde ponctuelle sont présentés dans le groupe de graphiques ci-dessous. Pour chaque mode, la courbe supérieure correspond au cas sans défaut (WTR = 0%), la courbe du milieu à un cas corrodé (WTR = 25%) et la courbe inférieure à la différence entre les deux signaux. Cette procédure de soustraction supprime la composante de transmission et isole la réflexion causée par le défaut, rendant le signal réfléchi clairement visible.
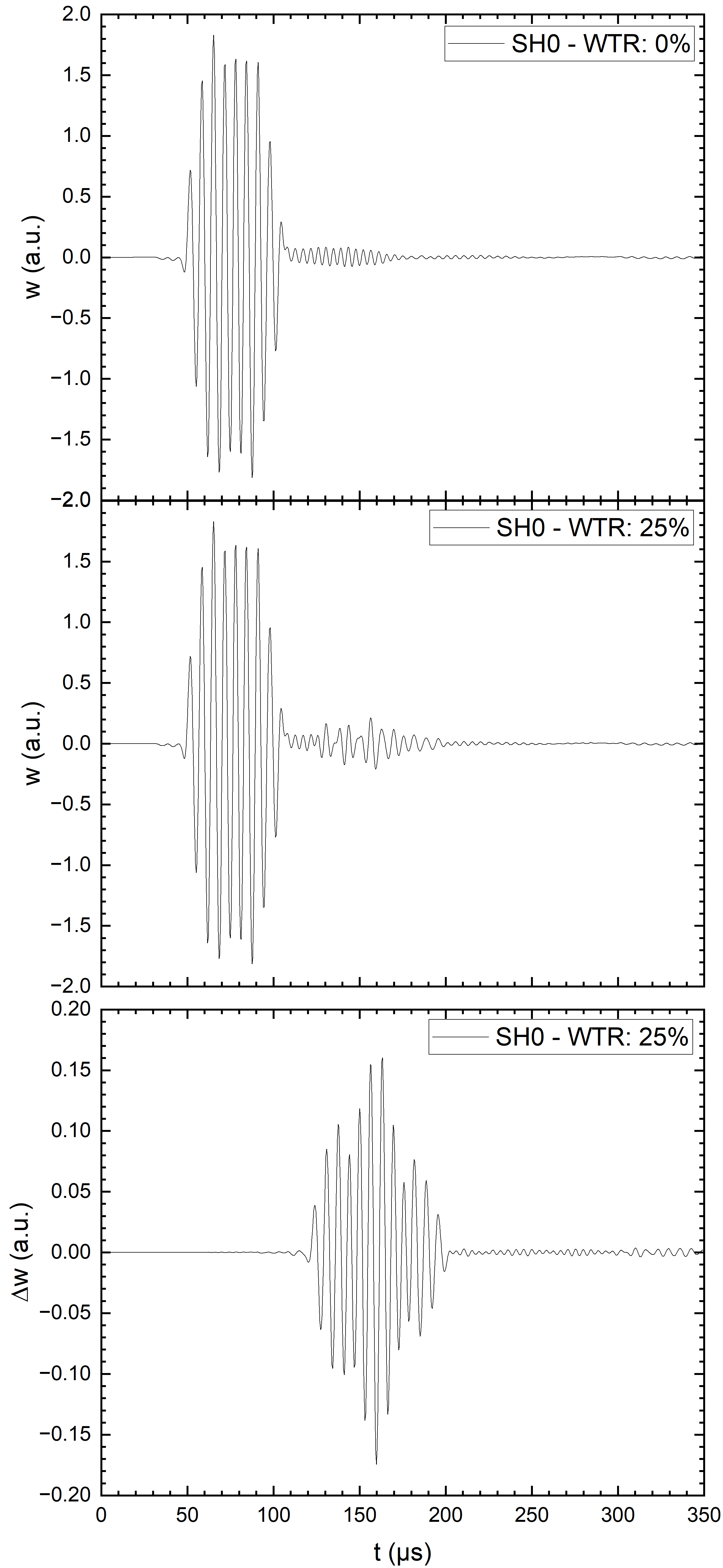
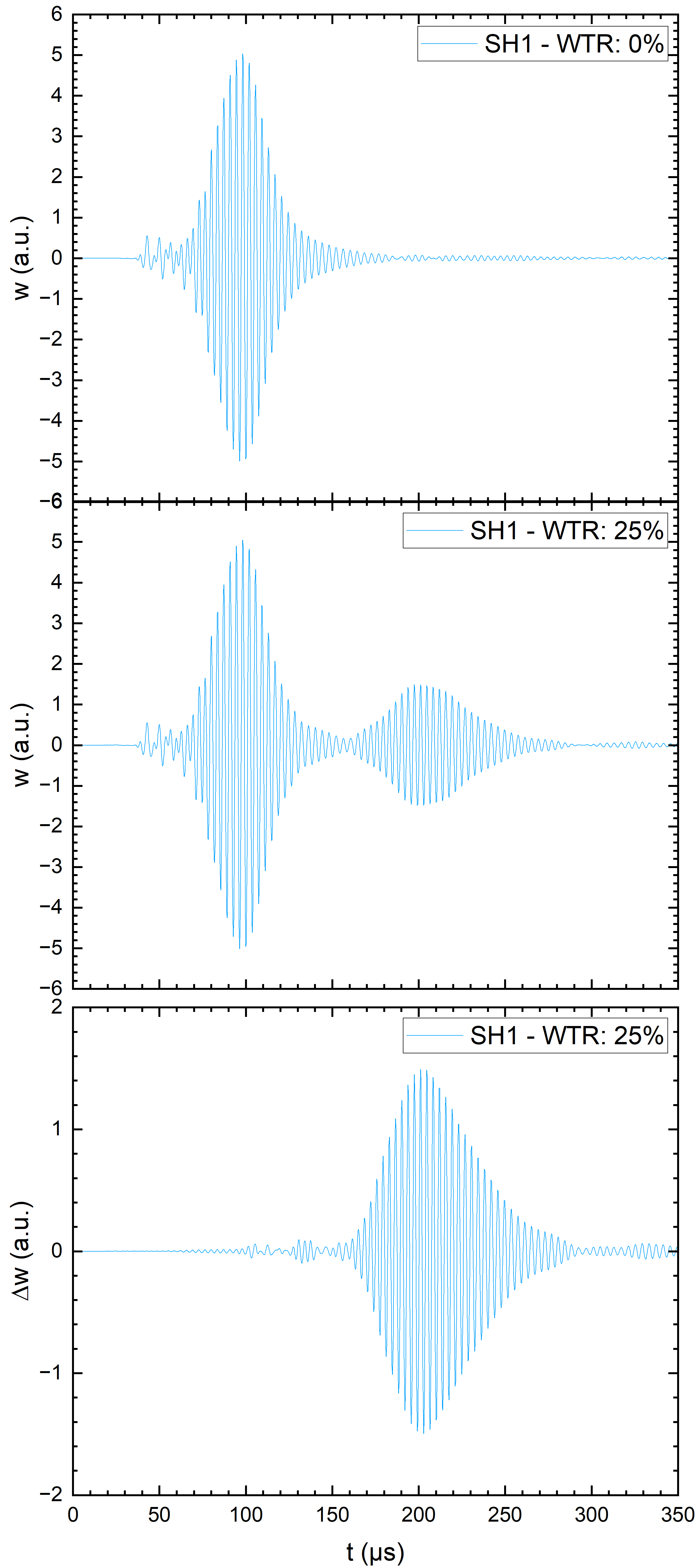
A-scans déterminés par échantillonnage en un point pour le mode SH0. En haut à gauche: WTR = 0%; Au centre à gauche: WTR = 25%; En bas à gauche: différence entre les deux courbes supérieures pour mettre en évidence la composante de réflexion. En haut à droite: WTR = 0%; Au centre à droite: WTR = 25%; En bas à droite: différence entre les deux courbes supérieures pour mettre en évidence la composante de réflexion.
La dépendance de l’amplitude de réflexion par rapport à la WTR est illustrée dans le graphique ci-dessous. Une différence nette apparaît entre les deux modes. A de faibles valeurs de WTR, inférieures à environ 25%, le mode SH1 présente une sensibilité plus élevée, produisant des réflexions plus fortes que le mode SH0. Au-delà de cette plage, cependant, l’amplitude de réflexion du mode SH1 diminue, tandis que celle du mode SH0 augmente de manière presque linéaire avec la profondeur de défaut.
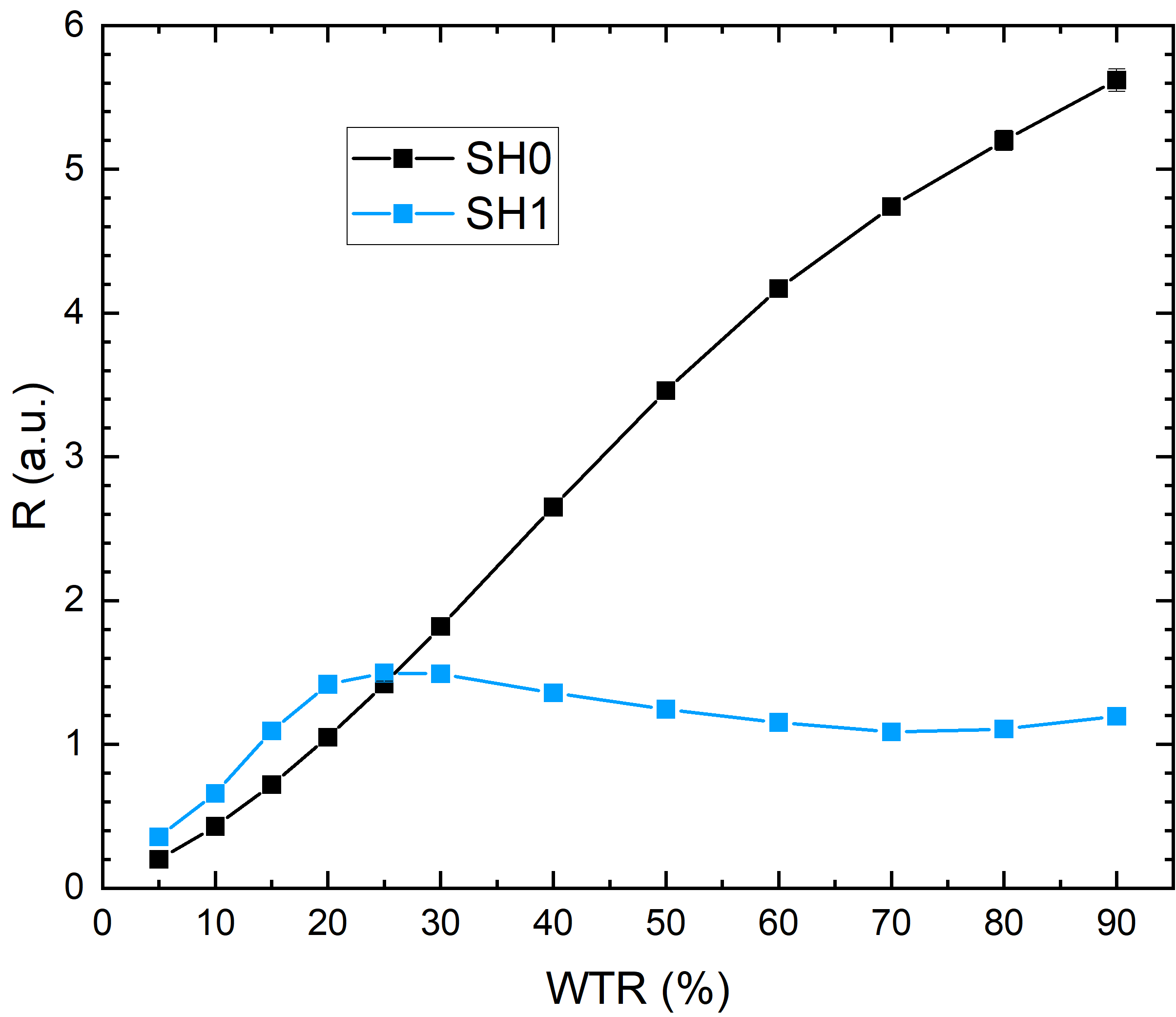 Amplitudes de réflexion pour les modes SH0 et SH1.
Amplitudes de réflexion pour les modes SH0 et SH1.
En contrepartie, le mode SH1 est dispersif et présente un profil de déplacement dépendant de la profondeur. À mesure que l’épaisseur locale de la paroi s’approche de la limite de propagation (d_WTR,20 mm = 1.32 mm ↔ 18.6%), le couplage effectif avec le défaut diminue, ce qui entraîne une réduction des amplitudes de réflexion. Les simulations révèlent en effet que le mode SH1 ne peut pas se propager à travers des défauts dépassant environ 18.6% de WTR. Dans de tels cas, une conversion de mode se produit dans la région du défaut, redistribuant l’énergie vers d’autres modes guidés.
Ces résultats soulignent une plage de sensibilités complémentaires. SH1 offre une sensibilité élevée pour détecter la corrosion à un stade précoce avec une WTR faible, tandis que SH0 conserve une forte détection dans le cas d’une WTR plus profonde. Les simulations reproduisent donc non seulement les observations expérimentales, mais offrent également une explication physique détaillée des mécanismes sous-jacents.
Perspectives: du modèle d’efforts surfaciques au modèle complet EMAT-GW
Les simulations présentées ici s’appuient volontairement sur un modèle d’excitation simplifié, dans lequel les effets physiques d’un couplage électromagnétique-ultrasonique ont été remplacés par des efforts surfaciques imposés. Cette approche a permis une étude efficace et méthodique de la propagation des ondes guidées, des caractéristiques de dispersion et de la sensibilité aux défauts. Même sous cette forme réduite, les simulations ont fourni des informations précieuses: elles ont montré les plages de détection complémentaires des modes SH0 et SH1, mis en évidence la dépendance de la réflexion par rapport à la WTR et confirmé le potentiel des ondes guidées pour la détection précoce de la corrosion dans les conduites encastrées.
Le principal avantage de cette approche réside dans son efficacité. En dissociant le mécanisme d’excitation du problème de propagation, il devient possible de concentrer les ressources de calcul sur l’interaction des ondes guidées avec les variations structurelles. Cette méthode a déjà fourni une justification physique à la sélection des modes, la fréquence d’excitation et la détectabilité des défauts: des paramètres qui orientent directement le développement des capteurs et les stratégies de contrôle.
La prochaine étape consiste toutefois à étendre le modèle afin de représenter complètement la physique du capteur EMAT. Dans ce modèle étoffé, la géométrie des bobines et le champ magnétique statique seront modélisés de manière explicite, de même que pour forces de Lorentz et la magnétostriction qui donnent lieu à l’excitation des ondes guidées. Inclure ces phénomènes permettra de prédire de manière réaliste l’apport d’énergie, de déterminer les caractéristiques réelles de rayonnement du champ d’ondes et d’optimiser la configuration du capteur pour des cas spécifiques de défauts.
En comblant le fossé entre l’excitation simplifiée basée sur des efforts et les simulations EMAT entièrement couplées, cette approche ouvre la voie au prototypage numérique des systèmes à ondes guidées. De tels modèles permettront non seulement de réduire les expériences par essai-erreur, mais aussi d’accélérer la conception de solutions EMAT fiables et spécifiques à chaque application dans le domaine des essais non destructifs en conditions difficiles.
A propos de l’auteur invité
Sascha Thieltges est physicien et chercheur scientifique à l’Institut Fraunhofer pour les essais non destructifs (IZFP), où il poursuit actuellement son doctorat. Ses travaux portent sur le développement et l’application de méthodes d’essais non destructifs électromagnétiques, notamment l’EMAT, le 3MA et les mesures d’hystérésis ferromagnétique. Un aspect central de ses recherches est la modélisation multiphysique de ces techniques, qui fait le lien entre les investigations expérimentales et la simulation numérique. Il est également chef de projet en recherche appliquée dans le domaine de la caractérisation des matériaux et de l’évaluation de leur état.
Références
- PwC and Oxford Economic, “Global Infrastructure Outlook – Infrastructure investment needs 50 countries, 7 sectors to 2040”.
- Thakur et al., “Chapter 1: Understanding the Chemistry and Common Issues of Infrastructure Corrosion,” Architectural Corrosion and Critical Infrastructure, 2025.
- Xu, “Corrosion is a global menace to crucial infrastructure — act to stop the rot now,” Nature, vol. 629, no. 41, 2024. doi.org/10.1038/d41586-024-01270-7.
- Li, “Materials science: Share corrosion data,” Nature, vol. 527, pp. 441–442, 2015. doi.org/10.1038/527441a.
- S. F. M. Iannuzzi, “The carbon footprint of steel corrosion,” npj Mater Degrad, vol. 6, no. 101, 2022. doi.org/10.1038/s41529-022-00318-1.
- L. Rose, Ultrasonic Guided Wave in Solid Media, Cambridge University Press, 2014.
- COMSOL, “Resolving Time-Dependent Waves,” https://www.comsol.com/support/knowledgebase/1118.

Commentaires (0)