- Bridging the Terahertz Gap
- Modeling the Lithium-Ion Battery
- Protection contre la Corrosion
- Modélisation des batteries
- Modélisation et Simulation dans le développement des piles à combustible
- Modélisation thermique des petits satellites
- Analyse électro-vibroacoustique d'un transducteur à armature équilibrée
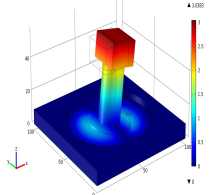
Modeling and Simulation of MEMS Based 3D Vibrating Gyroscope for Mobile Robotics Applications
In this study, a biomimetic vibrating 3D MEMS Gyroscope is designed, consisting of two circular diaphragms with a club shaped structure placed over one of them. This MEMS based vibrating gyroscope was modeled and simulated using COMSOL Multiphysics 4.1 - MEMS module.
The purpose of the research was to develop an effective gyroscope for guidance and control of mobile robots. The simulated results show that the displacement due to Coriolis effect, used for restoring the body back to its initial position, was greater when compared to that of the electrostatic force. These results have let us to conclude that this gyroscope would provide valuable orientation information for robotics applications. MEMS gyroscope technology provides cost-effective methods for improving directional estimation and overall accuracy in their navigation systems.
Téléchargement
- m_presentation.pdf - 0.53MB
- m_paper.pdf - 0.35MB