Designing a Lightweight Hyperloop Pod with Composite Materials
In July 2019, for the second year in a row, the EPFLoop team competed at the SpaceX Hyperloop Pod Competition. They returned to the track with a pod that was half the weight and twice the speed of their design from the previous year. One contributing factor to their enhanced design? Composite materials modeling.
Rachel Keatley
December 2020
Three, two, one, GO! A sleek Hyperloop pod flies down a mile-long test track under vacuum at 148 mph (or ~238 km/h). A team of engineering students watches in silence as the pod that they all helped design and build from scratch completes its run.
In 2012, building upon older ideas, entrepreneur Elon Musk popularized the concept of the Hyperloop, an extremely fast futuristic mode of transportation. To help make this vision a reality, Musk's aerospace company, SpaceX, announced that it would sponsor a design competition now known as the SpaceX Hyperloop Pod Competition. At this competition, engineering teams across the world are invited to show off their Hyperloop prototypes, with the top selections able to test their designs on the SpaceX test track in Hawthorne, California. To date, there have been four competitions: the first was held in January 2017.
During the 2019 SpaceX Hyperloop Pod Competition, returning competitors EPFLoop stepped up the design of their Hyperloop pod in a major way. One of the most noteworthy improvements to their pod? It is half the weight of their structure from the previous year's competition! A contributing factor to their pod's enhanced lightweight design is its compact composite build.
One Year Before the 2019 SpaceX Hyperloop Competition
In 2018, the EPFLoop team, made up of engineering students and technical advisers from the Swiss Federal Institute of Technology Lausanne (EPFL) and started by professor Mario Paolone, competed in their first SpaceX Hyperloop Pod Competition. They placed third, which is an impressive feat, considering over 5000 teams applied and only 20 were invited to the actual competition. EPFLoop enjoyed the experience so much that they dedicated themselves to another year of intensive work in the hopes of qualifying for the 2019 SpaceX Hyperloop Competition. Spoiler alert: They were invited back!
Going into the 2019 competition, EPFLoop’s goal was to design a lightweight Hyperloop pod that could support structural loads, such as inertial loads and vibration. The new pod’s chassis, pressure vessel, and aeroshell were all embedded into one compact structure. Each of these three structural components is composed of carbon fiber composite material.

Using composite materials is beneficial, according to Dr. Lorenzo Benedetti, the technical leader of the 2019 EPFLoop team, because “it allows for the pod structure to assume a specific shape, which is very favorable to improve its overall strength and performance.” Jérôme Harray, an EPFL student and member of the EPFLoop team, agrees: “Working with carbon fiber was convenient to adapt to the various electronic and propulsion components.” Compared to working with metals, Harray said carbon fiber allowed for more freedom during the design process, since it is possible to optimize the shape and placement of its layers. Carbon fiber is also ultra lightweight, strong (it is even stronger than steel and lighter than aluminum), and stiff, making it a great choice for building a Hyperloop pod prototype.
Although using a composite material in the Hyperloop pod was a bold move, with simulation, EPFLoop was able to efficiently design the pod's structure and focus on its manufacturing.
Months Leading Up to the Competition
EPFLoop manufactured every piece of their Hyperloop pod in-house at EPFL's Laboratory for Processing of Advanced Composites (LPAC). On top of creating custom pieces in the lab, which is challenging in its own right, the team had to ensure the quality of their pod. To accomplish all of their goals and stay on schedule, they turned to simulation for testing aspects of their design virtually. Simulation allowed EPFLoop to have a unified approach when designing every piece of their pod. “Every time we needed to test something, before even building it, we could use the power of simulation and make key decisions,” said Benedetti.


Considering that a majority of the structure of the pod is composed by thin walls, the team sought a tool that could efficiently model these components as 2D elements. Consequently, after an initial 3D solid geometry model, the carbon fiber parts were transformed to shell geometry using the Design Module, an add-on to the COMSOL Multiphysics® software.


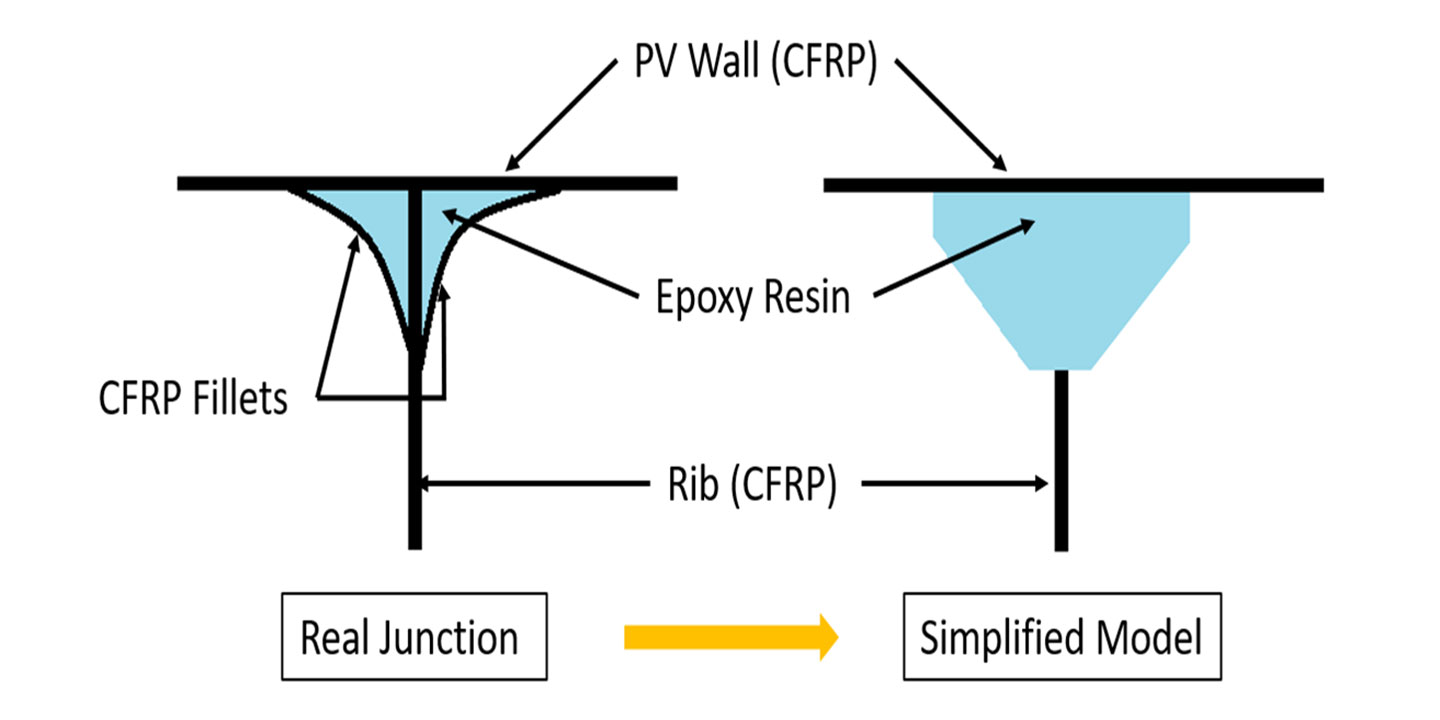
The team studied the strength of their pod’s main structural components, which include the pressure vessel, aeroshell, and chassis, under dynamic loads using the Composite Materials Module, an add-on to the Structural Mechanics Module and COMSOL Multiphysics®. The loads included 1 bar on the pressure vessel, a peak of 10 kN on the braking system, and vibrations generating up to 1.5 kN per set for the stability system. In addition, the linear induction motor produces on the inserts a 2.5-kN force during acceleration and 3.8-kN force during deceleration. Each of the three components (pressure vessel, aeroshell, and chassis) were modeled using layers of fiber-epoxy and foam plies. The pod's sandwich structure was analyzed using the equivalent single layer theory through the Layered Shell interface in the Composite Materials Module. The only solid parts in EPFLoop's model were the connections between the various composite panels, which are strengthened with structural epoxy adhesives.
"This multiphysics model was necessary because at the interface between two glued components, the adhesive can present a complex distribution of stresses, potentially causing critical failures," said Benedetti. "The shell model inherently is not able to capture all the details of an orthogonal connection between panels, while a solid model represents a valid alternative to investigate limits of the chosen design."
In order to meet SpaceX’s safety requirements, EPFLoop had to guarantee a minimum safety factor of two on the entire structure and three for the pressure vessel. For this reason, the team used the Tsai–Wu safety criterion as well as single limits on principal stresses to achieve the required target.
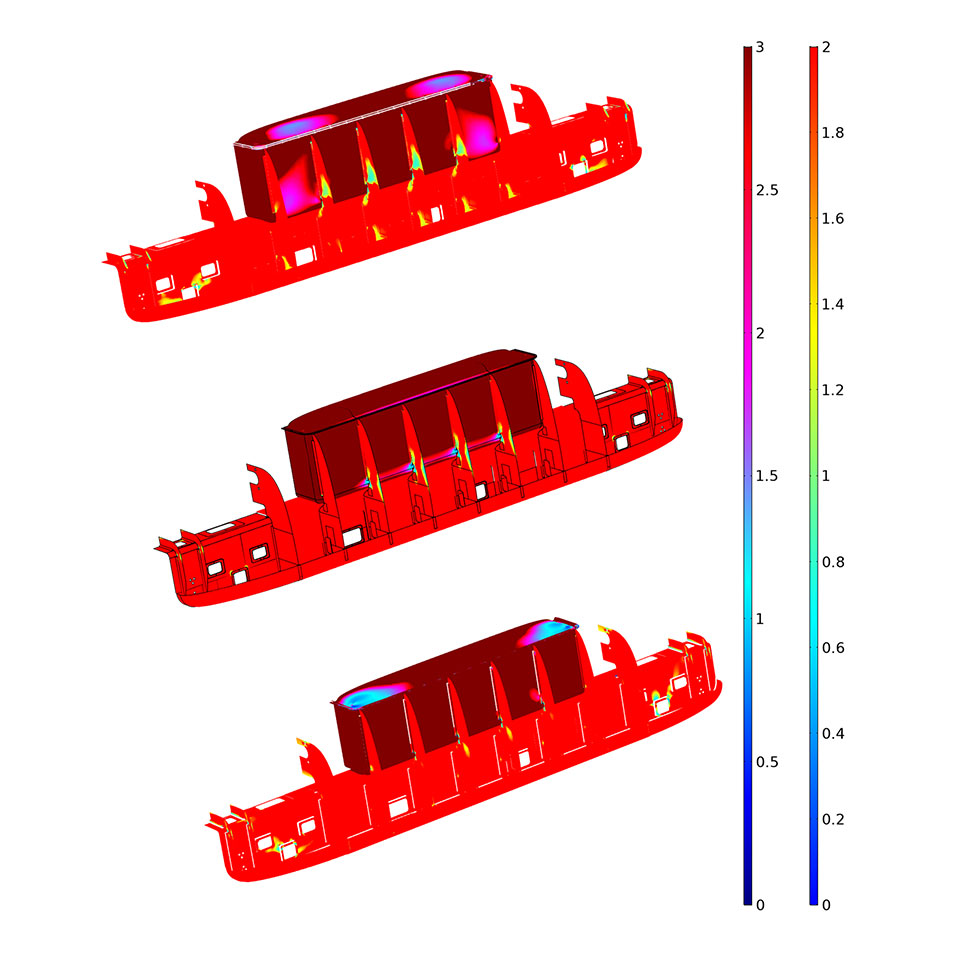
Using simulation, the team was able to successfully design an optimized Hyperloop pod that is as light as possible, while still resisting dynamic loads with the imposed safety factors. Compared to their 2018 pod design, "the mass of the structure was divided by two," said Benedetti. The new pod weighs around 331 lbs (or ~150 kg), while last year's pod weighed more than 661 lbs (or ~300 kg). Simulation helped the team ensure that the lighter design would perform well on the track. “In a time span of nine months, we cannot actually test everything experimentally, and at some point, we have to be sure of our results. We had a lot of good results and we confirmed them,” said Benedetti.
Week of the Competition
The night before shipping their Hyperloop pod to California for the 2019 competition, the EPFLoop team noticed a problem. "At some point, we were testing the pod and it was starting not to work," said Benedetti. The culprit? The pod’s propulsion system.
Their pod consisted of an innovative propulsion system composed of a linear induction motor (LIM). A system of this kind created a strong magnetic field in the pod and enabled it to repel itself from its aluminum rail, a feature important for acceleration. In addition, it helped reduce the pod’s overall weight. However, this kind of system comes with its fair share of difficulties. For instance, it requires a lot of currents, which run in tightly spaced coils, and each component in the system needs to be properly insulated to avoid current leaks or short circuits.
The team disconnected the entire pod and discovered a loose cable, which was causing short circuiting in the motor. After one sleepless night, they were able to fix the issue and the pod was ready to be shipped. "This was almost more exciting than the tests itself at the competition, because at that point, we knew we had something that was working and reliable," said Benedetti. That night, everyone in the EPFLoop team experienced an important lesson firsthand: "Once you find yourself in the field and you have to find a solution, then it's important to have an open mind and the capability of solving problems on the spot."
The actual competition took place for a week in July, starting and ending on a Sunday. During this week, all of the competitor's technical documents are evaluated and their pods are put through a series of tests. "We were so prepared for the competition that by Wednesday, we had already finished most of the tests," said Benedetti.
Day of the Final Race
Impressively, EPFLoop made it to the final race, which is only open to the four top-scoring teams, for the second year in a row. Their pod, Bella Lui, named after a mountain in the Bernese Alps, was ready to compete.
On the day of the final race, the team walked over to the track in unison, ready to cheer on Bella Lui. But for team member Nicolò Riva, the day of the final race was a completely different experience. Riva livestreamed the race from his phone because he was in Germany working toward his PhD. "I remember the exact moment that they did the run," said Riva. It was bittersweet because he was proud, but unable to be at the race in person. Even though Riva worked on the project remotely, he was still an integral part of the EPFLoop team.

For EPFLoop, nine months of hard work and sleepless nights led up to the four words: three, two, one, GO! And their pod was off. "We secured the third position, which is a great feat because we did it with a completely changed prototype from last year," said Benedetti. During the race, their lightweight composite pod reached a top speed of 148 mph (or ~238 km/h) — almost tripling the speed of their 2018 pod, which reached a top speed of 52 mph (or ~84 km/h). While traveling at record-breaking speeds, the 2019 pod could safely brake (or halt) in less than 1 second with 7 g peak deceleration, a feature equally as important as rapid acceleration.
Thanks to this project, students on the EPFLoop team learned how to design something innovative, create a prototype from scratch, and solve problems with the help of multiphysics simulation.