
L’un des défis dans le domaine du chauffage par induction réside dans la modélisation des propriétés non-linéaires des matériaux chauffés. Tous les matériaux présentent un comportement non-linéaire en fonction de la température; les matériaux magnétiques présentent également un comportement non-linéaire en fonction du champ magnétique. Il est nécessaire d’intégrer ces non-linéarités dans un modèle pour garantir leur précision. Nous allons ici examiner une méthode particulièrement pratique pour y parvenir, en utilisant l’interface Formulation en champ magnétique du module AC/DC, un module complémentaire du logiciel COMSOL Multiphysics®.
Pourquoi le chauffage par induction représente un défi en matière de modélisation
Le chauffage par induction est largement utilisé dans les applications de traitement des matériaux pour de nombreuses raisons, parmi lesquelles:
- La pièce à usiner est chauffée indirectement.
- La zone concernée peut s’étendre à l’intérieur du matériau.
- Le profil de chauffage dans le temps peut être contrôlé avec une grande précision en modifiant l’intensité et la fréquence des courants d’excitation.
Piloter précisément le processus de chauffage nécessite toutefois une boucle de rétroaction et une vérification expérimentale. Idéalement, cette boucle devrait être complétée par un modèle numérique intégrant les données expérimentales et capable de prédire l’évolution de la température dans le temps. Un modèle numérique est particulièrement utile, car il permet de prévoir le comportement dans des zones qui ne sont pas directement mesurables en temps réel.
En pratique, les modèles numériques posent plusieurs défis. Il faut disposer de données d’entrée fiables, à commencer par une description précise de la géométrie de la pièce à traiter et de la bobine de chauffage par induction, ainsi que d’une bonne connaissance des courants et des fréquences d’excitation. À partir de là, il faut également connaître les propriétés des matériaux et la manière dont elles varient.
Toutes les propriétés des matériaux varient en fonction de la température, et comme le chauffage par induction démarre généralement sur une pièce à température ambiante et la porte jusqu’à environ la température de fusion, ces non-linéarités ne peuvent jamais être négligées. Les conductivités électrique et thermique des métaux diminuent généralement avec l’augmentation de la température, mais ce n’est pas toujours le cas.
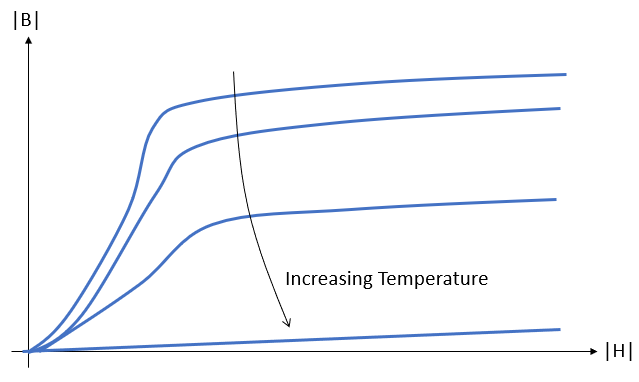 Courbes B-H représentatives à différentes températures. Au-dessus de la température de Curie, la pente de la courbe est égale à la perméabilité magnétique du vide.
Courbes B-H représentatives à différentes températures. Au-dessus de la température de Curie, la pente de la courbe est égale à la perméabilité magnétique du vide.
De plus, certains matériaux, notamment les matériaux magnétiques doux, présentent une perméabilité magnétique non-linéaire par rapport au champ magnétique, mais avec une hystérésis négligeable. Ces matériaux peuvent être caractérisés expérimentalement par une courbe B–H, qui relie la norme du champ \mathbf{B} à celle du champ \mathbf{H}. Ces courbes présentent également une variation en fonction de la température, leur norme diminuant progressivement jusqu’à la température de Curie, à partir de laquelle le matériau devient amagnétique. Bien que la forme de ces courbes soit généralement assez similaire à celle illustrée ci-dessus, les données expérimentales réelles peuvent être difficiles à obtenir et constituent souvent le principal obstacle à la mise en oeuvre d’un modèle numérique.
Mise en oeuvre du modèle: quelques principes préliminaires
Les processus de chauffage par induction se déroulent généralement sur une durée d’au moins quelques secondes, tandis que les fréquences d’excitation peuvent aller de 50 Hz à 450 kHz, voire au-delà. Cela signifie que le problème comporte deux échelles de temps. On peut supposer que les champs de température varient assez lentement par rapport à une période d’oscillation. En d’autres termes, les champs électromagnétiques ne détectent pas de variation de température sur un cycle. Cela conduit à utiliser une approche basée sur une méthode de résolution appelée Fréquentiel – temporel, dans laquelle les champs électromagnétiques sont résolus dans le domaine fréquentiel, tandis que le problème thermique est résolu dans le domaine temporel.
Les champs électromagnétiques sont effectivement recalculés, mais uniquement lorsque les propriétés du matériau varient en fonction d’un changement de température. L’analyse en domaine fréquentiel repose sur l’hypothèse explicite que les propriétés du matériau restent constantes sur un cycle. Cependant, dans la pratique, les champs électromagnétiques varient généralement de manière non-linéaire sur un cycle. Nous cherchons généralement à chauffer le matériau aussi rapidement que possible, ce qui signifie que les courants d’excitation et les champs qui en résultent vont amener le matériau dans la partie non-linéaire de la courbe B-H.
Pour résoudre cette contradiction apparente, nous recourons au concept de courbe B–H effective, qui utilise une approche énergétique pour calculer une courbe qui approxime le comportement non-linéaire. Ces courbes peuvent être calculées à partir de la courbe B–H expérimentale présentée sous forme de tableau. Le processus consiste à acquérir des données B–H, effectuer un nettoyage à l’aide d’un vérificateur de courbe B-H, puis à utiliser les données lissées dans un calculateur de courbe B-H effective.
En suivant les étapes exposées ci-dessus, vous devriez désormais disposer d’au moins trois ensembles de données concernant le matériau de la pièce:
- température
- conductivités électrique et thermique non-linéaires
- un ensemble de courbes B–H effectives à différentes températures pour chaque matériau chauffé
Pour établir un modèle thermique complet, vous aurez également besoin de la masse volumique et de la chaleur spécifique, ainsi que de l’émissivité de surface, car il faudra toujours tenir compte au moins des pertes par rayonnement. La chaleur spécifique varie également toujours en fonction de la température. La masse volumique est considérée comme constante: toute variation de volume doit être modélisée en tenant également compte de la dilatation thermique du matériau. L’émissivité de surface est également maintenue constante dans cet exemple, bien qu’elle puisse également varier en pratique.
Les bobines d’induction sont presque toujours refroidies à l’aide de conduites en cuivre dans lesquelles circulent de l’eau; elles sont donc beaucoup plus simples à modéliser, car leur température est fixe. En général, la répartition de la chaleur à l’intérieur de la bobine elle-même ne nous intéresse pas. Nous avons seulement besoin de savoir comment les courants circulant dans la bobine chauffent la pièce à traiter. Cela conduit à une approche de modélisation plus simple consistant à utiliser la fonctionnalité Condition d’impédance de frontière pour modéliser uniquement la surface de la bobine, évitant ainsi d’avoir à en mailler le volume intérieur. Si nécessaire, vous pouvez éviter cette simplification et modéliser également le volume de la bobine.
La pièce, quant à elle, doit toujours être modélisée comme un volume, car les variations de propriétés ne peuvent pas être modélisées avec précision par une condition de surface. De plus, les champs varient souvent de manière assez brusque dans la direction normale à la surface, mais de façon assez progressive dans la direction tangentielle. C’est pourquoi il est recommandé d’utiliser un maillage en couches limites. En 3D, il peut même s’avérer utile de partitionner la géométrie en introduisant des couches au niveau de la surface.
Petite parenthèse: utilisation d’équations analytiques pour la courbe B–H effective
Bien que les données expérimentales constituent la référence absolue, il n’est pas toujours facile de les obtenir avec une grande précision, en particulier sur une large plage de températures. C’est pourquoi il est parfois judicieux d’utiliser des expressions plus simples pour la courbe B–H, surtout lorsque celles-ci permettent ensuite d’obtenir des expressions analytiques pour la courbe B–H effective.
Voici deux expressions utiles pour la norme du champ \mathbf{B}, B = \lVert \mathbf{B} \rVert, en fonction de la norme du champ \mathbf{H} , H = \lVert \mathbf{H} \rVert:
Ces dernières présentent le même comportement limité: à faible champ magnétique, la pente (la perméabilité relative différentielle) est \partial B / \partial H = \mu_{rd} = \mu_0\left( 1+B_{sat}/H_0 \right), et pour des champs plus élevés, la pente est \mu_0, égale à celle de l’espace libre. La densité de flux de saturation, B_{sat}, est le point où la pente tend vers la limite de l’espace libre.
En utilisant cette forme, nous pouvons facilement introduire une dépendance à la température pour approximer le comportement à mesure que nous nous approchons de la température de Curie, au-delà de laquelle les matériaux peuvent être considérés comme non-magnétiques. Pour ce faire, nous faisons de la densité de flux de saturation une fonction de la température, où la fonction B_{sat}\left(T\right) peut prendre n’importe quelle forme tant qu’elle tend vers zéro au-delà de la température de Curie. En général, elle décroît de façon monotone; nous pouvons donc poser une courbe de la forme illustrée dans le graphique ci-dessous, avec une décroissance polynomiale jusqu’à la température de Curie. Une telle courbe peut être définie à l’aide d’une fonction Définie par morceaux dans COMSOL®, et un terme de lissage peut être ajouté pour assurer la stabilité numérique.
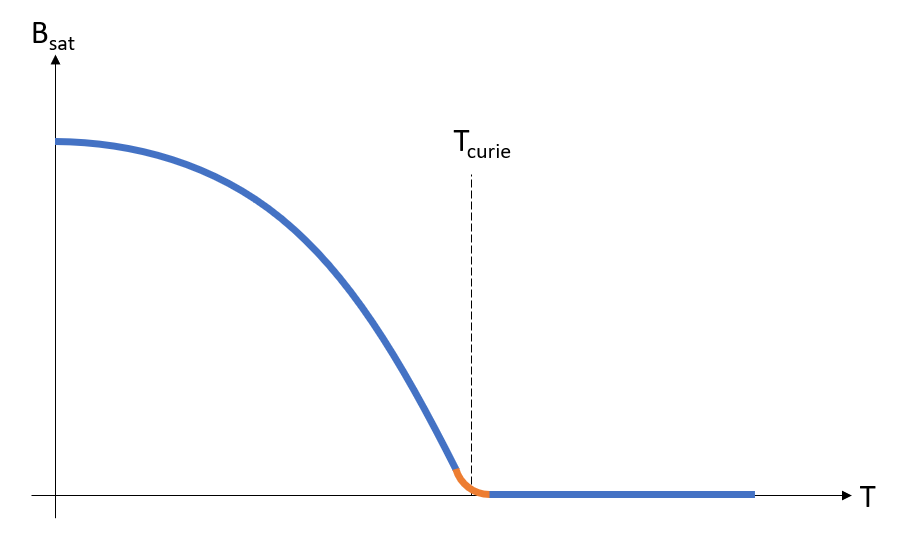 Approximation de l’évolution du comportement magnétique en fonction de la température. Un lissage est appliqué sur une petite zone autour de la température de Curie.
Approximation de l’évolution du comportement magnétique en fonction de la température. Un lissage est appliqué sur une petite zone autour de la température de Curie.
Grâce à ces expressions, nous pouvons désormais déduire une expression analytique de la courbe B–H effective à l’aide de la méthode Energie simple, où:
Nos deux expressions ci-dessus deviennent alors:
Il convient de noter que nous pourrions également introduire une dépendance à la température dans le terme H_0, ce qui modifierait à la fois l’amplitude et la pente de la courbe B–H. Il faut souligner que ces éléments ne sont présentés qu’à titre d’approximations pratiques, et que vous pourriez répéter ce raisonnement pour d’autres fonctions et d’autres équations permettant de calculer la courbe B–H effective. En l’absence de données expérimentales de haute qualité, celles-ci peuvent constituer un point de départ raisonnable pour votre modélisation.
Implémentation d’un modèle à l’aide de l’interface Formulation en champ magnétique
Nous allons ici nous intéresser au cas d’un profilé carré en acier chauffé par une bobine à trois spires. Nous supposerons que l’espacement entre les spires de la bobine n’a pas d’incidence significative sur la solution et nous nous appuierons sur cette hypothèse pour exploiter la symétrie de la pièce et de la bobine afin de réduire la taille du modèle.
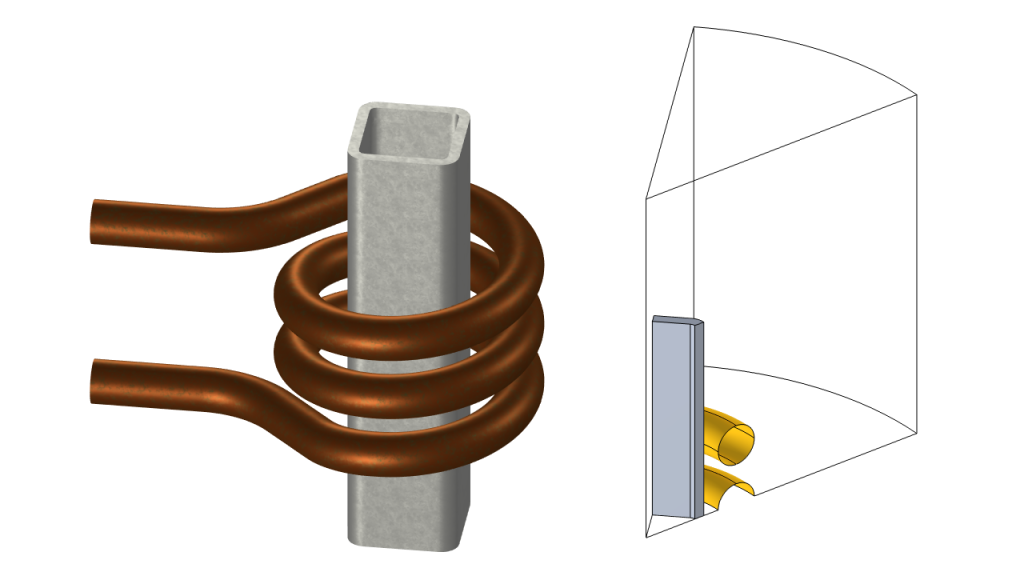 Une bobine inductive à trois spires enroulée autour d’un tronçon de profilé carré en acier (à gauche) peut être représentée par un modèle à l’échelle 1/16ème (à droite) de la pièce et de l’espace libre qui l’entoure.
Une bobine inductive à trois spires enroulée autour d’un tronçon de profilé carré en acier (à gauche) peut être représentée par un modèle à l’échelle 1/16ème (à droite) de la pièce et de l’espace libre qui l’entoure.
L’approche que nous adopterons ici consiste à utiliser l’interface Formulation en champ magnétique, qui résout directement le champ \mathbf{H}. Cela la rend légèrement plus adaptée à la modélisation de matériaux dont la non-linéarité dépend explicitement du champ \mathbf{H} lui-même. Nous avons déjà présenté comment introduire des excitations avec cette formulation, et nous utiliserons une contrainte globale pour fixer le courant d’excitation de la bobine.
En renseignant la non-linéarité du matériau, il est possible de réduire le coût du calcul en évitant la dérivation symbolique par rapport au champ magnétique dans la relation B-H effective du matériau. Pour ce faire, utilisons l’opérateur nojac (). Bien que cela puisse parfois entraîner une augmentation du nombre d’itérations du solveur, chaque itération nécessite moins de temps et de mémoire, ce qui se traduit par une amélioration globale. Notez que cette remarque est valable que vous utilisiez les expressions analytiques définies ci-dessus ou des données tabulées.
L’approche de résolution utilise le solveur Fréquentiel – temporel, qui utilise par défaut une approche ségrégée pour les modèles 3D. Le champ \mathbf{H} est résolu à l’aide d’un solveur direct, ce qui constitue une excellente occasion d’essayer le nouveau solveur direct creux (NVIDIA CuDSS) de NVIDIA CUDA® si vous disposez d’une carte graphique appropriée.
Les résultats sont présentés ci-dessous sous forme d’animation et montrent les effets de l’augmentation de la température. La perméabilité relative effective varie à mesure que la pièce se réchauffe, pour finalement redevenir égale à 1 une fois la température de Curie dépassée.
Animation illustrant l’évolution dans le temps de la perméabilité relative effective, qui dépend de l’intensité du champ et de la température.
En ce qui concerne le maillage, vous pouvez utiliser la fréquence de fonctionnement maximale, ainsi que la conductivité et la perméabilité effective maximale, pour calculer l’épaisseur de peau minimale. Par ailleurs, vous pouvez tester différents ordres de discrétisation des éléments, bien que dans le cas de matériaux fortement non-linéaires, l’ordre linéaire soit généralement privilégié.
Le coût de calcul d’un modèle tridimensionnel peut bien sûr être important; c’est pourquoi il est toujours recommandé de simplifier le modèle en exploitant ses symétries. Pour aller encore plus loin, il est souvent possible de réduire le modèle à deux dimensions. Ces modèles sont particulièrement utiles, car ils peuvent vous aider à définir une stratégie de maillage efficace pour vos modèles tridimensionnels.
Les modèles bidimensionnels permettent souvent d’obtenir des approximations raisonnables d’un modèle tridimensionnel, pour un coût de calcul bien moindre. Les résultats en 2D sont reportés sur les faces 3D correspondantes.
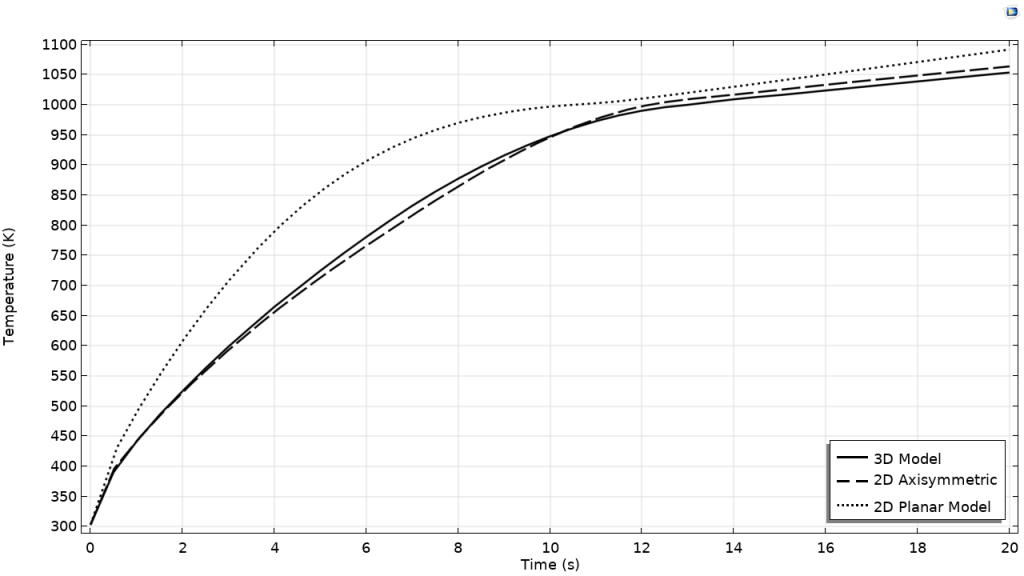 Comparaison des résultats entre les modèles 2D et 3D.
Comparaison des résultats entre les modèles 2D et 3D.
On ne saurait trop insister sur l’importance de la création de modèles 2D, car ceux-ci permettent souvent d’obtenir une très bonne estimation de la solution 3D et facilitent considérablement l’étude de stratégies de maillage, de résolution de calcul et de discrétisation. À mesure que vous développerez ce type de modèles, vous souhaiterez probablement inclure davantage de phénomènes physiques, tels que la détermination des propriétés mécaniques: Induction Hardening of a Cylindrical Pin.
Conclusion
Nous avons montré ici qu’il est facile d’utiliser une formulation en champ \mathbf{H} pour modéliser et résoudre le chauffage par induction de matériaux présentant une non-linéarité à la fois vis-à-vis du champ magnétique et de la température. Cette formulation peut s’avérer plus stable et, par conséquent, converger plus rapidement que d’autres approches, en particulier en présence de fortes non-linéarités.
Vous souhaitez vous lancer dans ce domaine ? Téléchargez le modèle en cliquant sur le lien ci-dessous.

Commentaires (0)