
Le logiciel COMSOL Multiphysics® intègre des fonctionnalités permettant de créer et d’utiliser des modèles de substitution basés sur les données. Il s’agit de modèles simplifiés et peu gourmands en ressources de calcul qui permettent d’approximer le comportement de simulations plus complexes et souvent plus coûteuses. Grâce à leur relative simplicité, les modèles de substitution trouvent de nombreuses applications pratiques, telles que l’amélioration de l’interactivité des applications et l’accélération des tâches d’optimisation et de quantification des incertitudes.
Les étapes de création des modèles de substitution
Comment créer un modèle de substitution dans COMSOL®? Le processus consiste en quelques étapes, décrites ci-dessous, partant d’un modèle paramétrique finalisé, qu’il s’agisse d’un modèle monophysique ou multiphysique:
- Ajoutez et exécutez une étude Apprentissage du modèle de substitution, qui s’appuie sur les méthodes de plans d’expériences pour échantillonner l’espace des paramètres du modèle.
- Ajoutez un modèle de substitution adapté et entraînez-le à partir des données de simulation stockées dans la table Design Data. Vous pouvez également entraîner le modèle de substitution en utilisant, par exemple, des données expérimentales.
- Utilisez le modèle de substitution dans une application ou un jumeau numérique, ou à d’autres fins.
Ce processus est également illustré dans la figure ci-dessous.
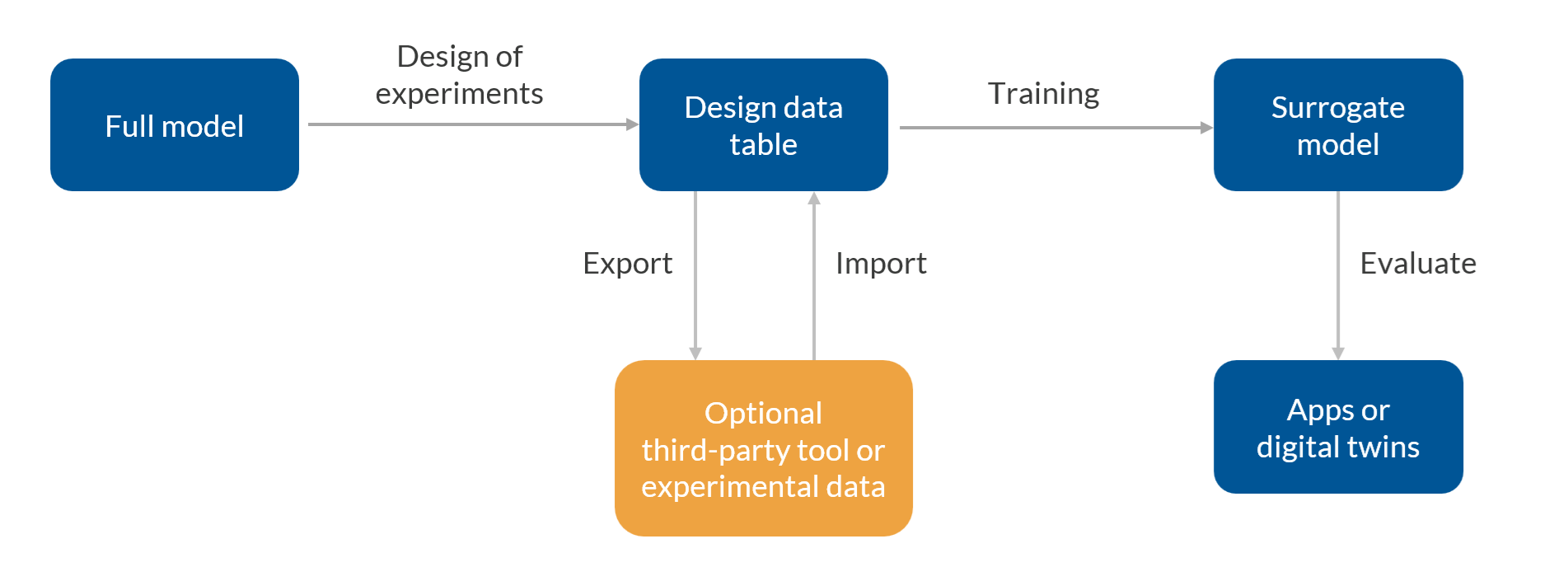 Les étapes de mise en oeuvre des modèles de substitution.
Les étapes de mise en oeuvre des modèles de substitution.
Utilisation des modèles de substitution dans les applications de simulation
Les modèles de substitution permettent notamment d’accélérer le fonctionnement des applications de simulation créées avec le Constructeur d’applications. Dans l’exemple de l’application d’antenne patch à microbande présenté ci-dessous, le recours à un modèle de substitution remplace la résolution du modèle complet par éléments finis, ce qui permet d’obtenir une réponse quasi instantanée lors de la modification des dimensions de l’antenne ou des propriétés des matériaux. Sur l’image ci-dessous, on peut voir comment l’application affiche le diagramme de gain de l’antenne issu du modèle de substitution entraîné, présenté à côté du résultat du modèle d’origine à des fins de comparaison.
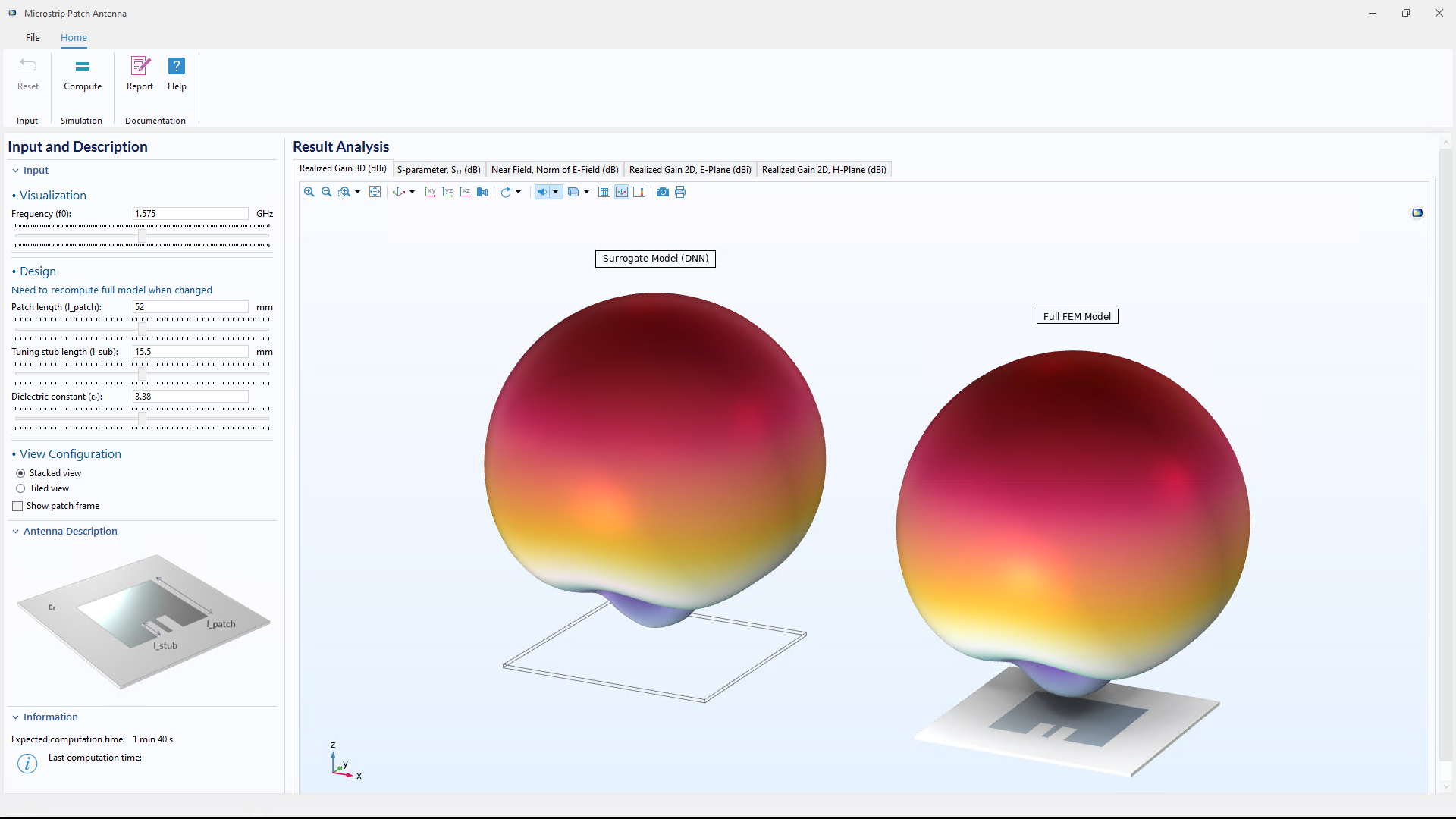 Une application de simulation permettant de comparer les résultats d’un modèle de substitution avec ceux d’un modèle complet.
Une application de simulation permettant de comparer les résultats d’un modèle de substitution avec ceux d’un modèle complet.
L’image ci-dessous présente un autre exemple d’application de simulation accélérée à l’aide de modèles de substitution. Dans ce cas précis, un ensemble de modèles de substitution est utilisé pour reconstituer le potentiel électrique, la température et les contraintes au sein d’un actionneur MEMS. L’utilisateur peut modifier de manière interactive, à l’aide de curseurs, quatre dimensions géométriques du modèle CAO ainsi que la tension appliquée. Grâce aux modèles de substitution, l’application réagit instantanément, offrant ainsi une expérience bien plus interactive que ne le permettrait un modèle de simulation complet.
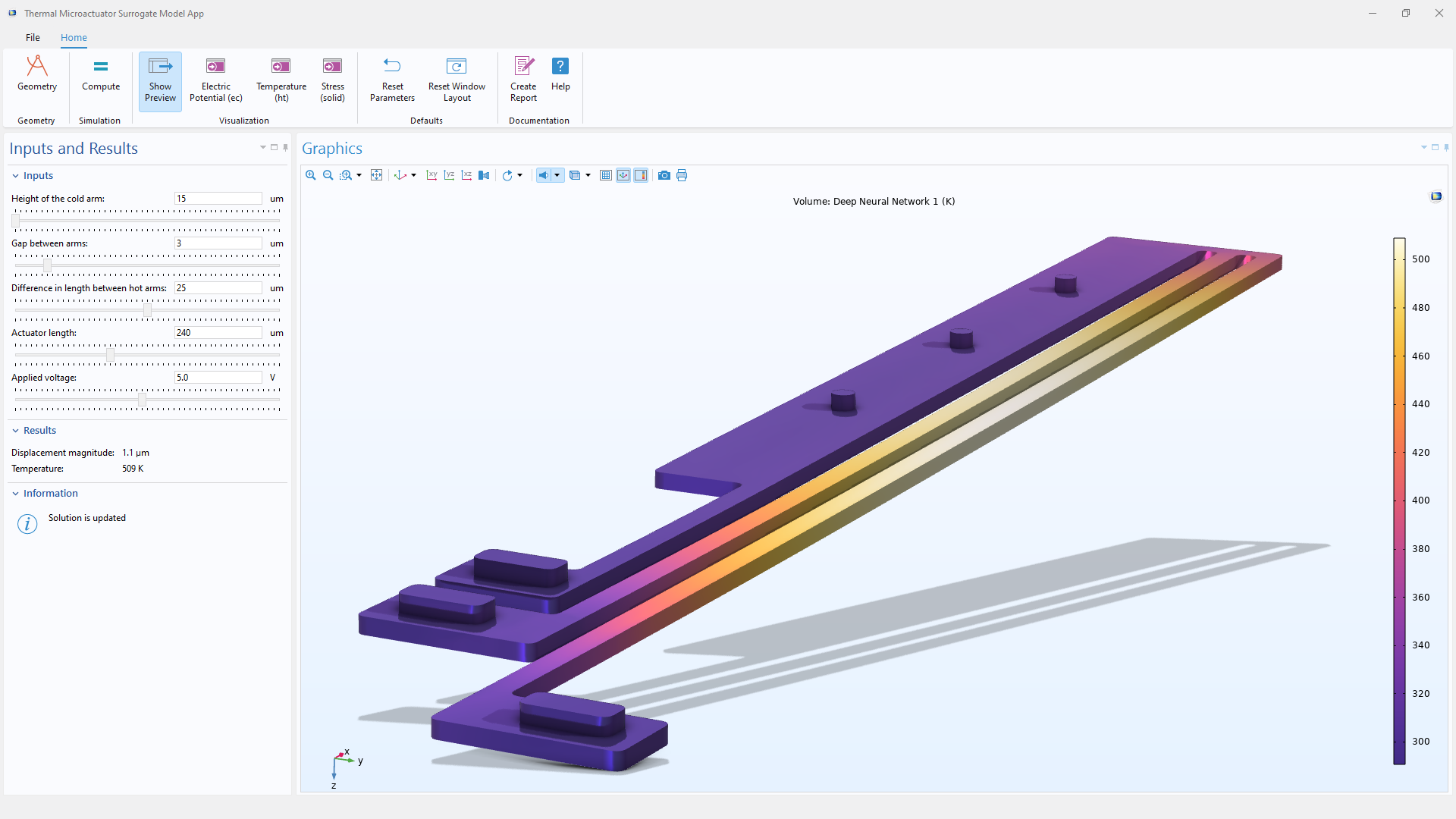
Une application de simulation d’un actionneur MEMS, utilisant plusieurs modèles de substitution pour visualiser et évaluer rapidement des grandeurs physiques telles que la température, les contraintes et le champ électrique.
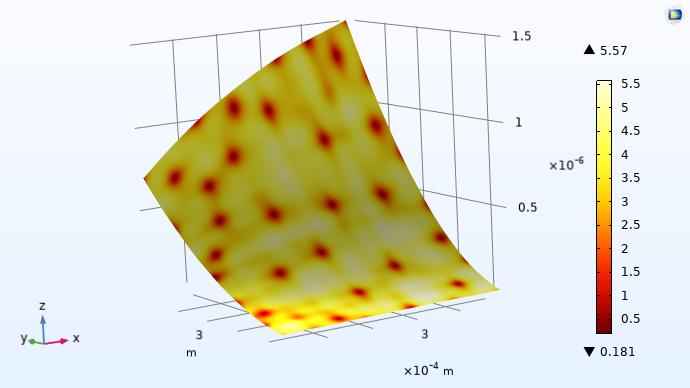
Dans l’application de MEMS présentée ci-dessus, la visualisation et l’analyse des résultats sont générées à partir d’un ensemble de fonctions de modèles de substitution qui sont appelées en arrière-plan. Une fonction correspondant au champ de température est illustrée dans l’image ci-dessous.
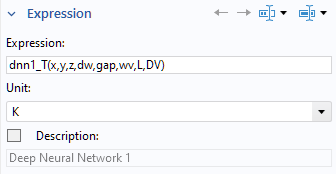 L’appel d’une fonction du modèle de substitution à réseau de neurones profond (DNN), utilisé en arrière-plan dans l’application de MEMS.
L’appel d’une fonction du modèle de substitution à réseau de neurones profond (DNN), utilisé en arrière-plan dans l’application de MEMS.
La syntaxe dnn1_T(x, y, z, dw, gap, wv, L, DV) appelle une fonction DNN nommée dnn1_T, avec les huit arguments d’entrée indiqués entre parenthèses:
- Trois coordonnées spatiales: x, y, et z
- Quatre dimensions CAO: dw, gap, wv, et L
- La tension appliquée: DV
Ce type d’appel de fonction remplace l’évaluation des grandeurs de champ définies par le modèle de simulation complet, qui est en l’occurrence un modèle par éléments finis.
Chaque modèle de substitution peut définir plusieurs fonctions, chacune pouvant comporter un nombre illimité d’arguments d’entrée. Ces fonctions représentent généralement des grandeurs physiques telles que le champ électrique, la température ou la contrainte. Les fonctions des modèles de substitution pouvant être dérivées, elles se prêtent bien aux tâches d’optimisation basées sur les gradients, comme la modélisation inverse, nécessitant d’évaluer la sensibilité par rapport aux paramètres d’entrée.
Les types de modèles de substitution
COMSOL® propose trois types de modèles de substitution: le réseau de neurones profond (DNN), le processus gaussien (GP) et l’expansion en chaos polynomial (PCE). Le modèle de substitution DNN est inclus dans les fonctionnalités natives du logiciel et ne nécessite aucun module complémentaire. Les modèles de substitution GP et PCE sont apportés par le module Uncertainty Quantification. Ils sont créés et entraînés automatiquement à l’aide de solveurs dédiés ou d’études de calcul d’incertitude. Cependant, chacun de ces trois types de modèles de substitution peut être entraîné à partir de tous types de données de simulation ou expérimentales.
 Une surface de réponse pour un modèle de substitution de type GP montrant l’estimation de l’incertitude (écart-type).
Une surface de réponse pour un modèle de substitution de type GP montrant l’estimation de l’incertitude (écart-type).
Une fois entraînés, les modèles de substitution sont disponibles sous forme de fonctions dans le nœud Définitions globales, prêts à être utilisés dans l’ensemble du modèle. Chaque type de modèle de substitution présente ses propres avantages. Le choix du type de modèle dépend du problème à résoudre: les DNN sont particulièrement efficaces pour les problèmes complexes et de grande dimension avec des ensembles de données d’entraînement volumineux, tandis que les modèles GP et PCE sont plus adaptés lorsque l’on a besoin d’évaluer le niveau de confiance ou d’incertitude d’une prédiction.
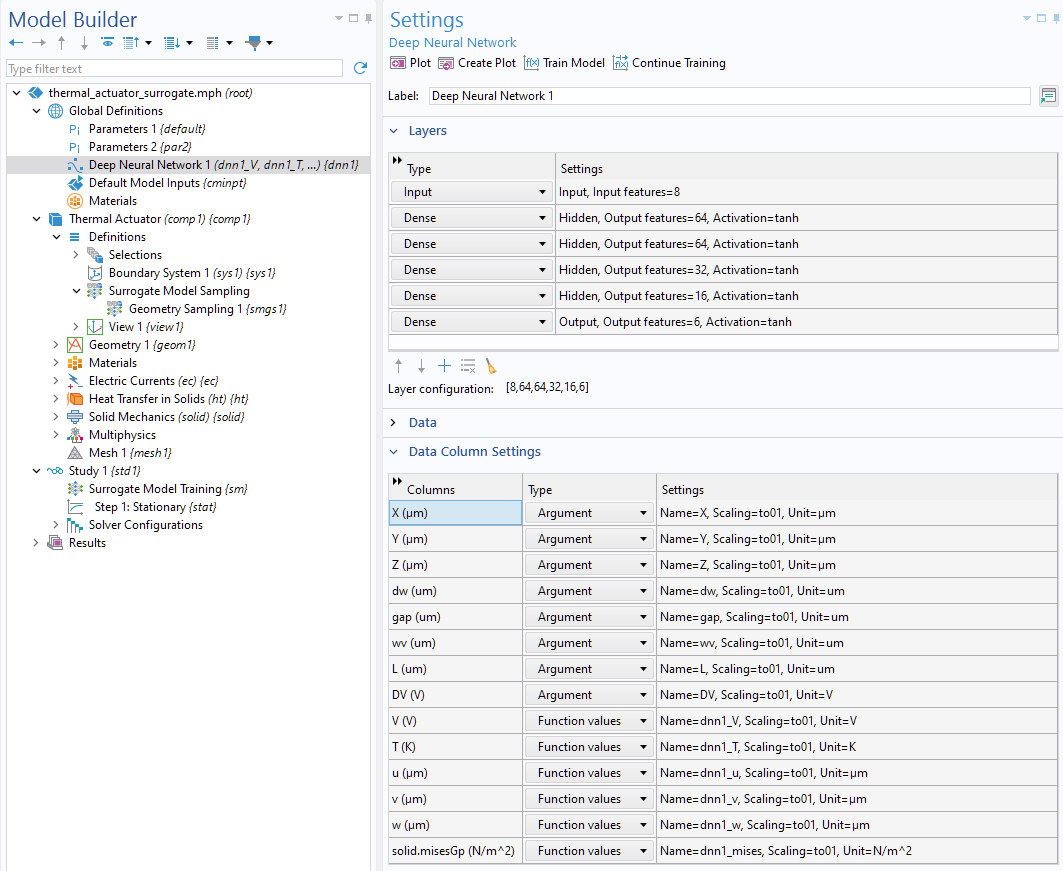 Une définition de modèle de substitution DNN comprenant six fonctions et huit arguments d’entrée. L’interface utilisateur permet de personnaliser le nombre de couches ainsi que le nombre de noeuds par couche.
Une définition de modèle de substitution DNN comprenant six fonctions et huit arguments d’entrée. L’interface utilisateur permet de personnaliser le nombre de couches ainsi que le nombre de noeuds par couche.
Il est à noter que, pour les petits ensembles de données, les modèles GP peuvent être plus faciles à créer et offrent de meilleures performances que les modèles DNN.
Voyons maintenant plus en détail comment sont générées les données utilisées pour entraîner ces modèles.
Génération des données d’entraînement
L’étude Apprentissage du modèle de substitution sert à générer les données nécessaires à l’entraînement des modèles de substitution. Elle effectue un balayage paramétrique à l’aide de méthodes de plans d’expériences et peut être configurée pour balayer pratiquement n’importe quelle combinaison de paramètres d’entrée et de sortie. Le résultat est une table de données de simulation qui sert de base à l’entraînement. Les modèles de substitution ne sont pas limités à une physique en particulier; ils peuvent être utilisés dans des applications relevant de l’électromagnétisme, de la mécanique des structures, de l’acoustique, de la mécanique des fluides, du transfert de chaleur, du génie chimique ou de toute combinaison de phénomènes multiphysiques.
 Les premières lignes d’un fichier de données généré par l’étude Apprentissage du modèle de substitution.
Les premières lignes d’un fichier de données généré par l’étude Apprentissage du modèle de substitution.
Entraînement des modèles de substitution
L’entraînement est l’étape au cours de laquelle les données collectées sont ajustées à un modèle de substitution. Une fois entraîné, ce modèle peut remplacer la simulation d’origine, ce qui permet dans de nombreux cas d’accélérer considérablement le calcul tout en conservant une précision suffisante. Les modèles de substitution peuvent être entraînés automatiquement après l’étape de génération des données, ou bien ajoutés et entraînés manuellement lors d’une étape séparée.
La précision d’un modèle de substitution dépend de la quantité et de la qualité des données d’apprentissage. Un modèle plus précis nécessite généralement davantage de données, qui peuvent provenir de simulations, d’expériences physiques ou d’une combinaison des deux.
Lorsqu’on utilise des modèles de substitution, l’étape de génération des données prend généralement plus de temps que celle de l’entraînement. Cependant, ces deux étapes peuvent être accélérées. La génération des données peut l’être en exécutant les simulations sur un cluster, afin de calculer plusieurs points d’étude en parallèle. L’entraînement des modèles de substitution de type DNN peut exploiter l’accélération GPU, afin de réduire considérablement le temps d’entraînement pour les grands ensembles de données.
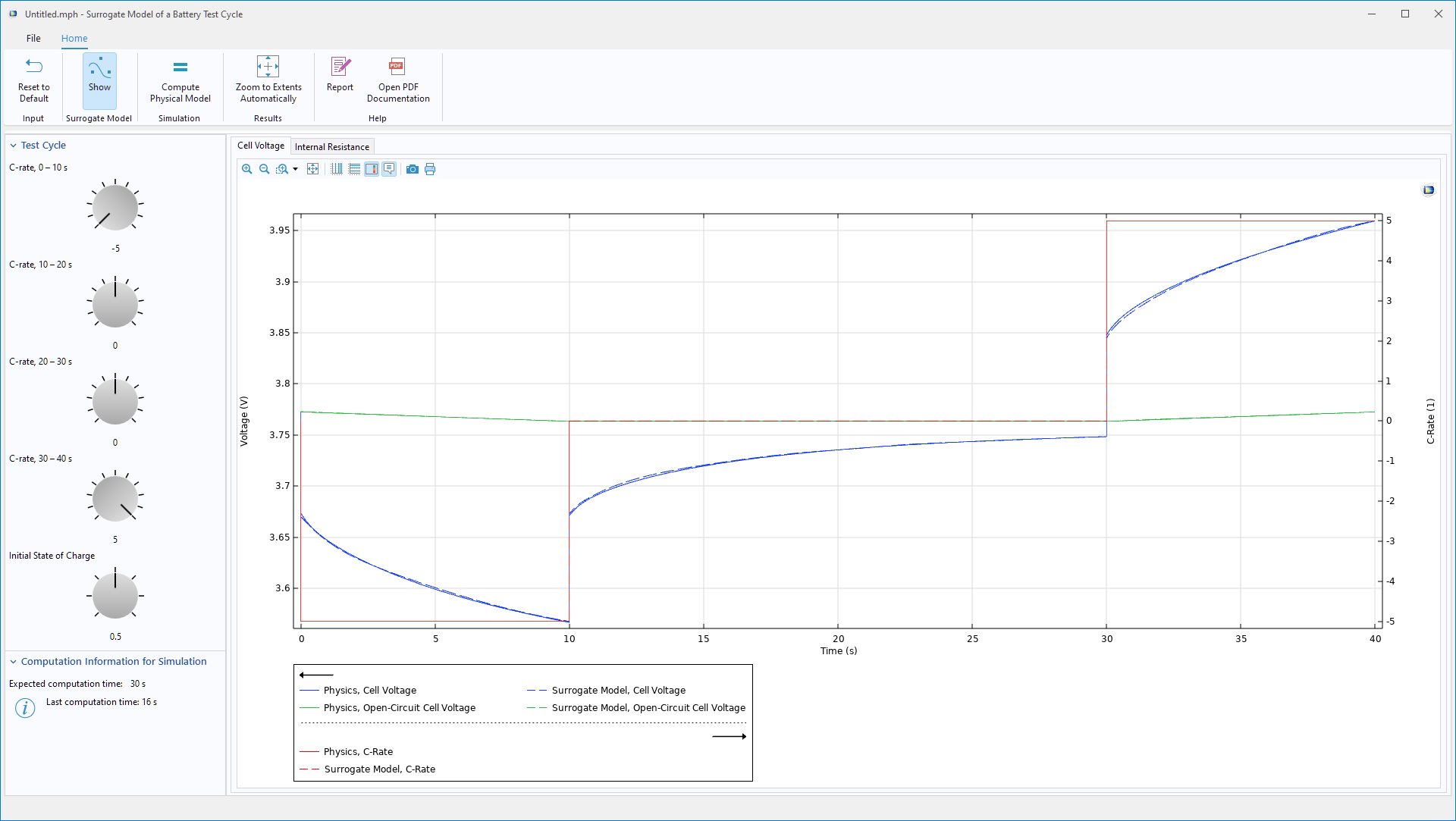 Une application permettant d’analyser le cycle de test d’une batterie, qui illustre comment un modèle de substitution DNN peut être utilisé pour reconstituer des grandeurs physiques variables dans le temps.
Une application permettant d’analyser le cycle de test d’une batterie, qui illustre comment un modèle de substitution DNN peut être utilisé pour reconstituer des grandeurs physiques variables dans le temps.
Approfondissez vos connaissances sur les modèles de substitution
Dans cet article de blog, nous avons présenté brièvement les fonctionnalités de COMSOL® permettant de créer et de construire des modèles de substitution. Pour une présentation plus complète de ces fonctionnalités, consultez notre cours sur les modèles de substitution dans le Centre d’apprentissage. Il s’agit d’un cours en autoformation divisé en 8 parties qui aborde notamment l’introduction à la création de modèles de substitution, l’ajustement des données à l’aide d’un DNN, l’évaluation de l’incertitude des modèles et l’échantillonnage géométrique.
Conseil: Pour en savoir plus sur les fondements théoriques des modèles de substitution, consultez ce cours du Centre d’apprentissage: “Surrogate Modeling Theory”.

Commentaires (0)