Nouveautés du module Multibody Dynamics
Pour les utilisateurs du module Multibody Dynamics, COMSOL Multiphysics® version 6.4 introduit des capacités pour la modélisation de liaisons ainsi que la modélisation automatique du contact entre plusieurs objets. Apprenez-en plus sur ces nouveautés ci-dessous.
Nouvelle interface Liaisons
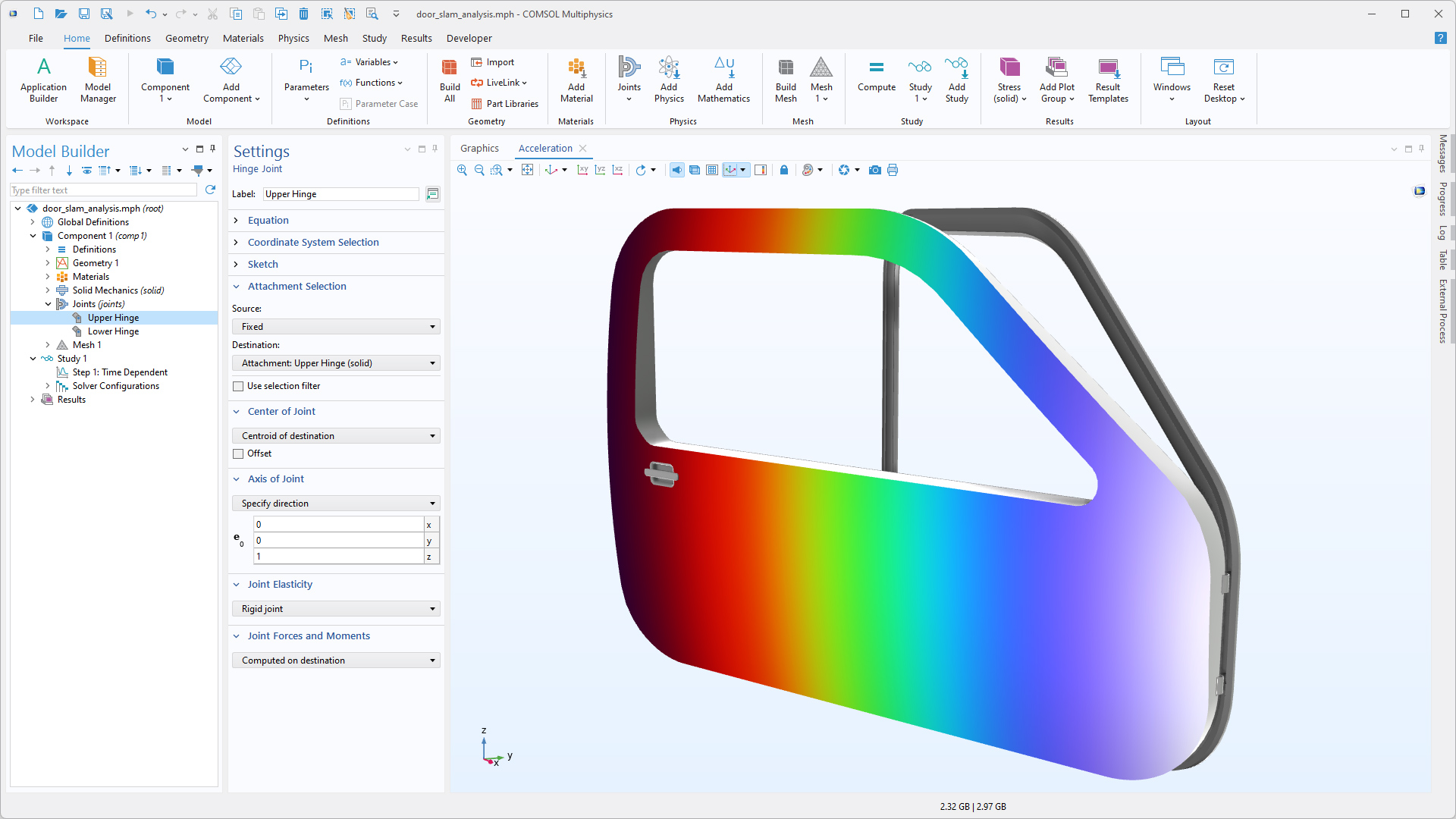
Une nouvelle interface Liaisons a été introduite pour analyser les assemblages mécaniques connectés par divers types de liaisons. Les types de liaisons disponibles, comprenant les pivots, glissières, et rotules, concordent avec ceux que l'on peut trouver dans l'interface Dynamique multicorps. Cet ajout rend plus fluide la modélisation des connexions dans les interfaces Mécanique du solide, Coque et Poutre. Cette nouvelle fonctionnalité est utile lorsqu'il n'est pas nécessaire d'utiliser l'ensemble des capacités de l'interface Dynamique multicorps. Cette fonctionnalité est illustrée dans le tutoriel Door Slam Analysis.
Modélisation automatique du contact avec un grand nombre d'objets
Pour créer facilement des modèles dans lesquels beaucoup d'interactions de contact sont possibles, un nouveau type de modélisation du contact a été introduit, qui configure automatiquement les conditions de contact entre plusieurs objets de manière arbitraire. Le tutoriel Objects Falling in a Box illustre cette nouvelle fonctionnalité ainsi que le workflow, considérablement amélioré.
Une tour de blocs en bois est percutée par une boule. Dans cette simulation, il y a 56 objets qui peuvent interagir entre eux d'une manière difficile à prévoir.
Nouveaux tutoriels
La version 6.4 de COMSOL Multiphysics® apporte deux nouveaux tutoriels au module Multibody Dynamics.
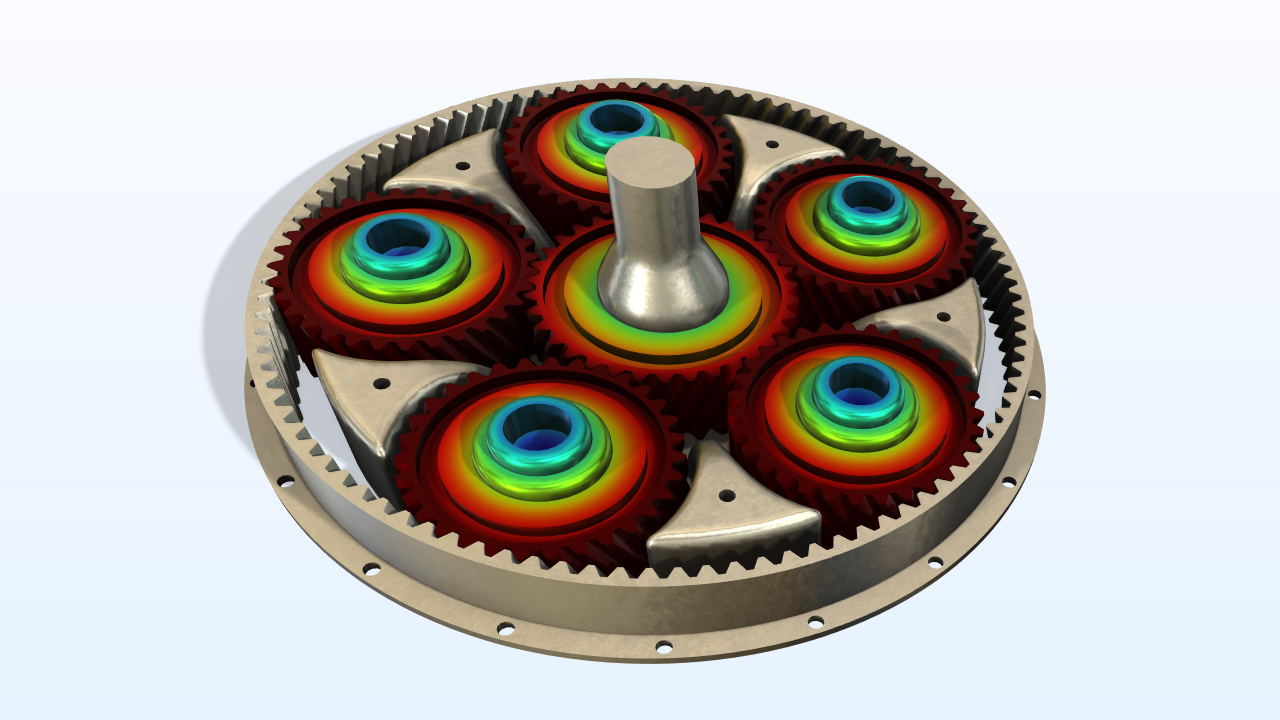
Transmission Ratios in a Planetary Gear Train
Door Slam Analysis
Distribution de l'accélaration dans l'assemblage d'une portière de voiture lorsqu'elle est claquée.